Ошибки планар 4: Коды ошибок автономки Планар
Планар 4ДМ-24 4ДМ-12 — автономный воздушный отопитель салона
Планар 4ДМ-24 Планар 4ДМ-12
Автономный воздушный отопитель салона
Отопитель Планар 4ДМ является автономным устройством и работает независимо от двигателя автомобиля. Принцип действия воздушного отопителя салона основан на принудительной вентиляции разогретого воздуха в теплообменной системе отопителя. Источником тепла являются газы от сгорания топливной смеси
в камере сгорания. Полученное тепло нагревает стенки теплообменника, который с внешней стороны обдувается воздухом. Воздух проходя через ребра теплообменника нагревается и поступает в салон автомобиля.
По желанию владельца автономный воздушный отопитель Планар 4ДМ может комплектоваться выносным датчиком температуры. Датчик температуры устанавливается в кабине в удобном для водителя месте. С пульта управления можно устанавливать температуру в пределах 15 — 30°С в зоне установки датчика температуры. Необходимую температуру отопитель Планар 4ДМ поддерживает в автоматическом режиме и при достижении её переходит на режим с более низкой теплопроизводительностью. Если первоначально установленная температура окажется ниже, чем окружающая, то отопитель будет работать в режиме вентиляции.
Необходимую температуру отопитель Планар 4ДМ поддерживает в автоматическом режиме и при достижении её переходит на режим с более низкой теплопроизводительностью. Если первоначально установленная температура окажется ниже, чем окружающая, то отопитель будет работать в режиме вентиляции.
Блок управления Планар 4ДМ постоянно следит за состоянием всех датчиков и если по каким-либо причинам отопитель не запустился, то
автоматически будет предпринята попытка повторного запуска. После двух неудачных попыток воздушный отопитель выключается. Также автоматическое выключение автономного отопителя происходит при прекращении горения, при перегреве теплообменника, при падении напряжения ниже 20 В для отопителей Планар 4ДМ-24 и ниже 10,5 В для отопителей Планар 4ДМ-12 или его повышении свыше 30,8 В и 16 В соответственно. В случае аварийного выключения Планар 4Д на пульте управления отопителем начнёт мигать светодиод. Количество миганий показывает код неисправности, расшифровать который можно обратившись к руководству по эксплуатации.
Количество миганий показывает код неисправности, расшифровать который можно обратившись к руководству по эксплуатации.
Область применения отопителей Планар 4ДМ-24 и Планар 4ДМ-12:
- Автофургоны и автобусы
- Кабины грузовиков со спальным местом
- Спецтехника
- Домики на колесах
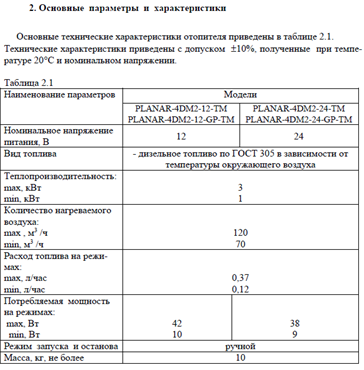
Технические характеристики воздушного отопителя салона Планар 4Д
| ||||||||||||||||||||||||||||
РЕМОНТ АВТОНОМОК ПЛАНАР
свеча накаливания для отопителей Планар 4дм
свеча накаливания для отопителей Планар 44д
свеча накаливания японская (GP) для отопителей Планар 2д, 44D-GP
свеча накаливания для отопителей Планар 8дм
сетка под свечу
кабинный датчик для отопителей Планар
камера сгорания для отопителей Планар 2д
камера сгорания для отопителей Планар 4дм
камера сгорания для отопителей Планара 44д
нагнетатель воздуха для отопителей Планар 2д, 44д
нагнетатель воздуха для отопителей Планар 4дм
блок управления (мозги) для отопителей Планар 2д
блок управления (мозги) для отопителей Планар 4дм
блок управления (мозги) для отопителей Планар 44д
металлорукав (выхлоп) для Планар 1 м (можно отрезать половину)
насос топливный для отопителей Планар 2д, 4дм, 44д
теплообменник для отопителей Планар 2д
теплообменник для отопителей Планар 4дм
теплообменник для отопителей Планар 44д
термостат для отопителей Планар 4дм
датчик температур для отопителей Планар 2д
индикатор пламени для отопителей Планар 4дм, 44д
пульт управления для отопителей Планар 4дм
пульт управления для отопителей Планар 2д, 44д
жгут электропитания с предохранителями для отопителей Планар
жгут топливного насоса для отопителей Планар 4дм, 44д
кожух входной для отопителей Планар 4дм
кожух выходной для отопителей Планар 4дм
кожух верхний для отопителей Планар 44д
кожух нижний для отопителей Планар 44д
решетка входная для отопителей Планар 44д
решетка выходная для отопителей Планар 44д
топливозаборник для отопителей Планар 44д
бак топливный прозрачный 7,5 литров для отопителей Планар
трубка топливная для Бинар и Планар (можно отрезать половину)
Воздуховод ( Ф 60х t 150 C)
Воздуховод (Ф 75х t 150 C)
Тройник Т — образный 90° 75*75*75
Тройник Т образный 90° 60*60*60
Тройник Y — образный 120 ° 75*75*75
Теплоизоляция для выхлопной трубы (рукав 28х5х450)
Решетка (жалюзи не поворотные) Ф 75 мм
Переходник для ПЛАНАР 4ДМ, 4ДМ-2 для воздуховода (90х75)
Переходник для ПЛАНАР 44D для воздуховода (96х75)
Переходник для камеры сгорания Планар
Хомут для топливного насоса резиновый
Резиновое уплотнение под отопитель Планар
| Код | Описание | Рекомендации |
| 0 | без дефекта | н/д |
| 4 | Предупреждение, короткое замыкание, выход – сигнал свежего воздуха | Подключить блок управления, гнездо 1 к реле нагнетателя воздуха, проверить на короткое замыкание на корпус (массу). Если подключение в порядке -> произвести замену блока управления. Если подключение в порядке -> произвести замену блока управления. |
| 5 | Предупреждение, короткое замыкание, выход – противоугонное устройство | Подключить блок управления, гнездо 2 к реле електр. разьединителя или вход, противоугонное устройство проверить на короткое замыкание на корпус (массу). Если подключение в порядке —> произвести замену блока управления. |
| 9 | TRS — отключение (TRS — отопитель для автомобилей, перевозящих опасные грузы) | TRS — отключение через изменение сигнала с (+) на (-) в точке подключения блока управления, гнездо 10 (D+) или через плюсовой сигнал в точке подключения блока управления, гнездо 12 (НА+), главный привод. |
| 10 | Отключение, повышенное напряжение | Напряжение между гнездом 5 и 11 на блоке управления > 15,9 (15,2) Вольт или соотв. 31,8 (30,4) Вольт. Напряжение между гнездом 5 и 11 на блоке управления < 10,5 (9,5) Вольт или соотв. 21 (19) Вольт. Данные в скобках являются действительными при включенной свече накаливания. |
| 11 | Отключение, пониженное напряжение | Напряжение между гнездом 5 и 11 на блоке управления > 15,9 (15,2) Вольт или соотв. 31,8 (30,4) Вольт. Напряжение между гнездом 5 и 11 на блоке управления < 10,5 (9,5) Вольт или соотв. 21 (19) Вольт. Данные в скобках являются действительными при включенной свече накаливания. |
| 12 | Перегрев | Проверить подключение блока управления вплоть до выключателя перегрева / датчика перегрева на проходимость. Выключатель перегрева (порог переключения 160°С — 190°С) или значения датчика перегрева. Проверить, не застопорены ли отверстия трубопровода для подвода воздуха для отопления, при необходимости устранить причину. |
| 13 | Повышенная температура теплообменника | Индикатор пламени выдает температуру на теплообменнике > 340 °С. Омическое значение на индикаторе пламени — 2270 П. Датчик перегревадефектен. Значения индикатора пламени |
| 15 | Повышенная температура, слишком много перегревов теплообменника | Блокировка блока управления через аварийное выключение. Повышенная температура на теплообменнике (код неисправности 013). Причина перегрева: застопорены отверстия трубопровода для подвода воздуха для отопления, при необходимости устранить причину. Деблокировка блока управления посредством стирания записанных в память кодов неисправностей с помощью таймера, диагностического прибора или компьютера. Повышенная температура на теплообменнике (код неисправности 013). Причина перегрева: застопорены отверстия трубопровода для подвода воздуха для отопления, при необходимости устранить причину. Деблокировка блока управления посредством стирания записанных в память кодов неисправностей с помощью таймера, диагностического прибора или компьютера. |
| 20 | Свеча накаливания — прерывание или короткое замыкание | Проверить свечу накаливания, при необходимости заменить. Заданное значение: около 0,6 или 2,2. Проверить подключение блока управления, гнездо 6 и 9 к свече накаливания на проходимость. Если подключение в порядке —> произвести замену блока управления. Проверить подключение блока управления, гнездо 9 к свече накаливания на короткое замыкание. Проверить свечу накаливания на короткое замыкание спирали накала. При необходимости заменить свечу накаливания. Если свеча накаливания в порядке —> произвести замену блока управления. |
| 21 | Выход свечи накаливания — перегрузка | Только для отопителя исполнения 24В. : установлена свеча накаливания 12В. Проверить свечу накаливания на короткое замыкание или на закоксовывание спирали накала. : установлена свеча накаливания 12В. Проверить свечу накаливания на короткое замыкание или на закоксовывание спирали накала. |
| 25 | Короткое замыкание на выходе диагностики | Проверить подключение блока управления, гнездо 4 к соединительному штекеру диагностики на короткое замыкание на плюс. |
| 33 | Дефект мотора горелки или регулировки числа оборотов. Отклонение от заданного числа оборотов | Отклонение от заданного числа оборотов > ± 10% продолжительностью более 30 сек. • Слишком низкое число оборотов: блокирован нагнетатель воздуха (проверить нагнетатель на свободный ход, при необходимости удалить инородные тела). В ином случае —» произвести замену нагнетателя воздуха. Проверить токоподводящие провода мотора горелки (1 br / 1 sw) и выход блока управления на короткое замыкание, при необходимости —> произвести замену нагнетателя воздуха или блока управления. • Слишком высокое число обороов : дефектный магнит в крыльчатке нагнетателя воздуха для сгорания или магнит отсутствует —> произвести замену нагнетателя воздуха для сгорания. Дефектный чувствительный элемент числа оборотов в блоке управления —> произвести замену блока управления. Дефектный чувствительный элемент числа оборотов в блоке управления —> произвести замену блока управления. |
| 47 | Дозировочный насос — короткое замыкание | Проверить подключение блока управления, гнездо 3 к дозировочному насосу на короткое замыкание, проверить дозировочный насос и при необходимости заменить. |
| 48 | Дозировочный насос — прерывание | Проверить подключение блока управления, гнездо 3 к дозировочному насосу на проходимость, проверить дозировочный насос на проходимость и при необходимости заменить. Проверить минусовой провод дозировочного насоса (1 br) до точки массы (корпуса). |
| 51 | Пламя при включении | После 15 мин. вентиляция (продувка свежим воздухом). Омическое значение индикатора пламени составляет >57°С (1220S2). |
| 52 | Запуска не происходит. Превышено время безопасности | В течении периода запуска пламя не опознано. Значения индикатора пламени < 100°С (138012).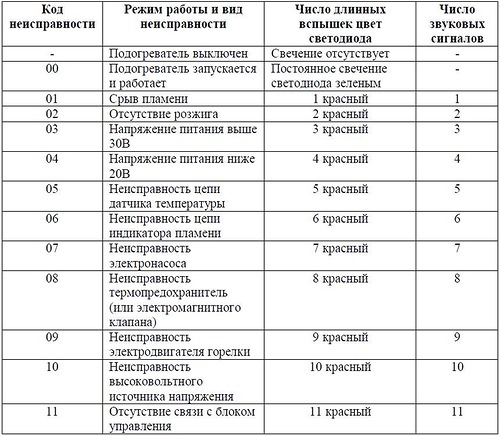 Индикатор пламени проверить, при необходимости заменить. Проверить подачу топлива, свечу накаливания. Проверить трубопровод воздуха для сгорания и газоотводящий трубопровод. Индикатор пламени проверить, при необходимости заменить. Проверить подачу топлива, свечу накаливания. Проверить трубопровод воздуха для сгорания и газоотводящий трубопровод. |
| 53 | Прерывание пламени на ступени регулирования POWER (сильная). | Запуск отопителя произошел (пламя опознано) и сообщается о прерывании пламени на одной из ступеней регулирования или же прерывание пламени при запуске. Проверить количество и подачу топлива. Проверить трубопровод воздуха для сгорания и газоотводящий трубопровод. Если процесс сгорания в порядке, то проверить индикатор пламени и при необходимости заменить. |
| 54 | Прерывание пламени на ступени регулирования GROSS (полная) | Запуск отопителя произошел (пламя опознано) и сообщается о прерывании пламени на одной из ступеней регулирования или же прерывание пламени при запуске. Проверить количество и подачу топлива. Проверить трубопровод воздуха для сгорания и газоотводящий трубопровод. Если процесс сгорания в порядке, то проверить индикатор пламени и при необходимости заменить. |
| 55 | Прерывание пламени на ступени MITTEL (средняя) | Запуск отопителя произошел (пламя опознано) и сообщается о прерывании пламени на одной из ступеней регулирования или же прерывание пламени при запуске. Проверить количество и подачу топлива. Проверить трубопровод воздуха для сгорания и газоотводящий трубопровод. Если процесс сгорания в порядке, то проверить индикатор пламени и при необходимости заменить. |
| 56 | Прерывание пламени на ступени регулирования KLEIN (малая) | Запуск отопителя произошел (пламя опознано) и сообщается о прерывании пламени на одной из ступеней регулирования или же прерывание пламени при запуске. Проверить количество и подачу топлива. Проверить трубопровод воздуха для сгорания и газоотводящий трубопровод. Если процесс сгорания в порядке, то проверить индикатор пламени и при необходимости заменить. |
| 60 | Дистанционный датчик регулирования температуры — прерывание | Датчик регулирования температуры сообщает температуру, лежащую за пределами диапазона измерений. Проверить соединительные провода 0,5 gr и 0,5 br/ws Омическое значение между 8 и 13 >2800,2 (при прерывании) Омическое значение между 8 и 13 < 280,2 (при коротком замыкании) Проверить соединительные провода 0,5 gr и 0,5 br/ws Омическое значение между 8 и 13 >2800,2 (при прерывании) Омическое значение между 8 и 13 < 280,2 (при коротком замыкании) |
| 61 | Дистанционный датчик регулирования температуры — короткое замыкание | Датчик регулирования температуры сообщает температуру, лежащую за пределами диапазона измерений. Проверить соединительные провода 0,5 gr и 0,5 br/ws Омическое значение между 8 и 13 >2800,2 (при прерывании) Омическое значение между 8 и 13 < 280,2 (при коротком замыкании) |
| 62 | Заданное значение потенциометра — прерывание | Потенциометр устройства управления выдает заданное значение за пределами регулировочного диапазона. Проверить соединительные провода. Омическое значение между 7 и 13 > 2800,12 (при прерывании). Омическое значение между 7 и 13 < 280 Q. (при коротком замыкании). Нормальные значения: 1740, 2 — 2180,2 (± 80, 2) |
| 63 | Заданное значение потенциометра — короткое замыкание | Потенциометр устройства управления выдает заданное значение за пределами регулировочного диапазона. Проверить соединительные провода. Омическое значение между 7 и 13 > 2800,12 (при прерывании). Омическое значение между 7 и 13 < 280 Q. (при коротком замыкании). Нормальные значения: 1740, 2 — 2180,2 (± 80, 2) Проверить соединительные провода. Омическое значение между 7 и 13 > 2800,12 (при прерывании). Омическое значение между 7 и 13 < 280 Q. (при коротком замыкании). Нормальные значения: 1740, 2 — 2180,2 (± 80, 2) |
| 64 | Индикатор пламени — прерывание | Индикатор пламени выдает температуру, лежащую за пределами диапазона измерений. Проверить соединительные провода. Омическое значение > 3200,2 (при прерывании). Омическое значение < 200,2 (при коротком замыкании) |
| 65 | Индикатор пламени — короткое замыкание | Индикатор пламени выдает температуру, лежащую за пределами диапазона измерений. Проверить соединительные провода. Омическое значение > 3200,2 (при прерывании). Омическое значение < 200,2 (при коротком замыкании) |
| 71 | Датчик перегрева — прерывание | Датчик перегрева выдает температуру, лежащую за пределами диапазона измерений. Проверить соединительные провода. Омическое значение > 3200,2 (при прерывании). Омическое значение < 200,12 (при коротком замыкании) Омическое значение < 200,12 (при коротком замыкании) |
| 72 | Датчик перегрева — короткое замыкание | Датчик перегрева выдает температуру, лежащую за пределами диапазона измерений. Проверить соединительные провода. Омическое значение > 3200,2 (при прерывании). Омическое значение < 200,12 (при коротком замыкании) |
| 90 | Блок управления неисправен (внутренний дефект / Reset) | Внутренний дефект в микропроцессоре / запоминающем устройстве — блок управления заменить. Неисправности в блоке управления из-за мешающих напряжений от бортовой сети автомобиля. Возможные причины: плохая аккумуляторная батарея, зарядное устройство — устранить мешающие напряжения |
| 91 | Наводка. Посторонние мешающие напряжения (посторонний дефект / Reset) | Внутренний дефект в микропроцессоре / запоминающем устройстве — блок управления заменить. Неисправности в блоке управления из-за мешающих напряжений от бортовой сети автомобиля. Возможные причины: плохая аккумуляторная батарея, зарядное устройство — устранить мешающие напряжения Возможные причины: плохая аккумуляторная батарея, зарядное устройство — устранить мешающие напряжения |
| 92 | Блок управления неисправен, (ROM — дефект в запоминающем устройстве) | Установлен внутренний дефект в микропроцессоре / запоминающем устройстве — блок управления заменить |
| 93 | Блок управления неисправен, (RAM — дефект в запоминающем устройстве) | Установлен внутренний дефект в микропроцессоре / запоминающем устройстве — блок управления заменить |
| 94 | Блок управления неисправен, (EEPROM — дефект в запоминающем устройстве) | Установлен внутренний дефект в микропроцессоре / запоминающем устройстве — блок управления заменить |
| 96 | Блок управления неисправен — дефектный внутренний датчик температуры | Блок управления заменить или использовать дистанционный датчик температуры. Заменить блок управления |
| 97 | Блок управления неисправен — дефектный осциллятор (автогенератор или пониженное напряжение) | Блок управления заменить или использовать дистанционный датчик температуры. Заменить блок управления Заменить блок управления |
Воздушный подогреватель салона ПЛАНАР-44Д
Современный и экологичные двигатели маршрутных такси, автобусов и грузовиков не выдают достаточного тепла для отопления и создания комфортных условиях в салоне. Особенно это актуально в нашей Сибири.
Поэтому в салоне необходимо установливать дополнительный источник тепла, и так чтобы он был полностью независим от двигателя. В этой статье мы покажем и расскажем про установку независимого топливного воздушного подогревателя ПЛАНАР-44Д (дизельное топливо) на маршрутный автобус ГАЗель Next c дизельным двигателем и независимым топливным подогревателем ДВС от Webasto.
Кратко опишу принцип работы подогревателя воздуха.
Подогрев происходит за счёт сжигания топлива из бака в закрытой камере сгорания. Стенки и ребрышки камеры сгорания нагреваются от пламени, а воздушный вентилятор прогоняет вдоль стенок камеры сгорания воздух из салона, он нагревается и уже тёплым возвращается в салон.
После нажатия на центральную кнопку на пульте подогревателя ПЛАНАР-44Д, модуль управления запускает программу запуска. Сначала происходит продувка камеры сгорания. В подогревателе, нагнетатель, засасывает воздух, для сгорания топлива, через отдельный воздуховод с фильтром установленный с наружи автомобиля.
Далее топливный насос (расположен отдельно, возле топливного бака) начинает закачивать топливо. В камере сгорания расположена свеча, она раскаляется и поджигает поступающее топливо. Факел пламени нагревает корпус горелки, отработанные выхлопные газы отводятся через выхлопную трубу. В это время нагнетатель прокачивает воздух из салона через ребра горелки. Горячие ребра нагревают проходящий воздух и уже нагретый воздушный поток возвращается в салон. Принцип действия очень похож на работу фена, и поэтому на жаргоне такой воздушный подогреватель часто называют феном.
В настоящий момент установочный комплект ПЛАНАР-44 поставляется вместе с дополнительным топливным баком на 7 литров. Это удобно в некоторых случаях:
Это удобно в некоторых случаях:
— когда сложно или не хочется устанавливать отдельный топливозаборник из штатного бака;
— когда автомобиль работает на газе или дизеле, а подогреватель хочется установить работающий на бензине.
— когда требуется полная автономность, например при установке в прицепе или автодоме на колёсах и т.п.
Наша компания прошла обучение по установки автономных подогревателей и является официальным дилером жидкостных предпусковых подогревателей и воздушных отопителей производства Адверс — Теплостар.
Вернёмся к нашей маршрутке и опишу процесс установки подогревателя ПЛАНАР-44Д на конкретный автомобиль.
Подогреватель будет устанавливаться в задней части салона, под самым последним левым сидением. Так, чтобы нагретый воздух дул в проход. Тёплый воздух поднимаясь в верх естественным образом перемешивается с холодным воздухом салона и быстрее нагревает весь салон, а то, что сначала воздух дует по низу, позволяет быстрее отогреть замёрзшие ноги пассажирам.
Воздушный подогреватель и весь комплект для монтажа поставляется в одной коробке. Комплект универсальный, практически подходит под любое транспортное средство. В нашем случает установки на ГАЗель Next, нам не потребовался дополнительный топливный бак на 7 литров и пластины крепления корпуса подогревателя. Мы будем подключаться к существующему топливозаборнику, а подогреватель установим и закрепим прямо на полу под сидением.
Инструкция на подогреватель ПЛАНАР-44Д идет на 2х языках — русском и английском.
Для того, чтобы было удобно устанавливать подогреватель, сначала из салона маршрутки демонтируем последнее левое сидение. После окончания монтажа и всех проверок мы его вернём на место.
Пульт управления подогревателем установим в кабине водителя. На панели с правой стороны.
С низу автобуса намечаем места выхода труб и жгутов от подогревателя.
В выбранном месте размечаем отверстия. С подогревателем ПЛАНАР-44Д поставляется пластиковая монтажная шайба. С её помощью очень удобно нанести разметку на будущее место установки и аккуратно просверлить отверстие под монтажные болты и выходные патрубки.
С её помощью очень удобно нанести разметку на будущее место установки и аккуратно просверлить отверстие под монтажные болты и выходные патрубки.
Аккуратно просверливаем отверстия в полу. Пол сделан из многослойной фанеры и покрыт жестким износостойким линолеумом, поэтому проблем с отверстиями не возникает.
Проверяем и подгоняем монтажную пластину ПЛАНАРа.
Устанавливаем ПЛАНАР-44Д на его рабочее место.
Планар-44Д установлен на своё место. Рядом просверлено отверстие для протягивания электрических жгутов управления и питания.
Теперь спускаемся в смотровую яму под Газель Next, чтобы закрепить ПЛАНАР-44Д болтами крепления.
Подсоединяем к ПЛАНАР-44Д трубы выхлопа и подачи воздуха на горелку.
Присоединяем к ПЛАНАРу топливопровод, тонкая полупрозрачная пластиковая трубка.
На раме ГАЗели Next, в районе топливного бака устанавливаем топливный насос ПЛАНАР
Там же рядом с топливным баком на раме установлен другой топливный насос от подогревателя двигателя Webasto.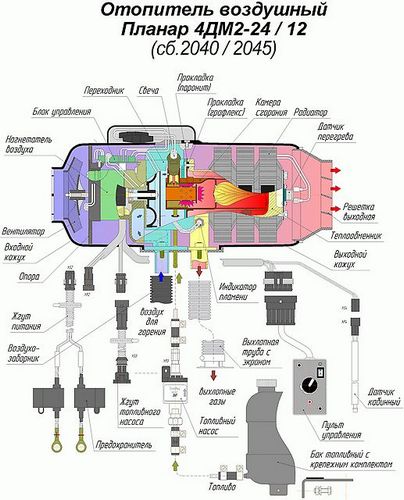 Для этого подогревателя в баке уже установлен дополнительный топливозаборник, поэтому в этом случае мы не будем снимать бак и устанавливать еще один топливозаборник.
Для этого подогревателя в баке уже установлен дополнительный топливозаборник, поэтому в этом случае мы не будем снимать бак и устанавливать еще один топливозаборник.
Подключаем топливопровод для ПЛАНАРа, к уже существующему топливопроводу, идущему на Webasto. Для подключения берем из комплекта ПЛАНАРа пластиковый тройник, заранее его готовим к установке, надеваем соединительные резиновые трубки и стальные хомуты.
Под ГАЗелью, находим наилучшее место для разреза топливопровода между баком и насосом Webasto в этот разрез устанавливаем тройник.
В месте разреза устанавливаем тройник и соединяем топливопроводы между собой и насосом ПЛАНАР.
Затем, закрепляем все трубопроводы под днищем автомобиля. В комплекте идут практически все необходимые стяжки, хомуты и монтажные пластины. На этом этапе все слесарные работы заканчиваются, остались только электрические.
Протягиваем все электрические жгуты к ПЛАНАРу, через ранее просверленное отверстие. В последствии после пуско-наладки это отверстие будет загерметизировано герметикам.
В последствии после пуско-наладки это отверстие будет загерметизировано герметикам.
К ПЛАНАРу подключается:
— жгут питания,
— жгут топливного насоса и
— жгут соединяющий с пультом управления.
Под автомобилем, вдоль рамы протягиваем жгуты. Подключаем разъём к топливному насосу. Проводим жгут питания до АКБ и жгут управления до кабины водителя.
Пройдя под днищем ГАЗели, выходим под капот. Жгут питания ПЛАНАР доводим до АКБ, но пока не подключаем, до завершения всех электромонтажных работ.
В кабине водителя намечаем место установки пульта управления ПЛАНАРом, самое удобное место под панелью на центральной торпедо. Рядом расположена легкосъемная «пепельница», через которую мы сможем произвести подключение.
На полу, в районе рычага переключения передач, водитель установил специальный короб с вещевыми ящиками и подлокотником. Мы предварительно этот короб демонтировали, чтобы получить доступ к закрытому ранее полу. В полу водительской кабины, через просверленное отверстие, протягиваем жгут управления ПЛАНАРом, а потом вернём короб с подлокотником на место, закрыв тем самым отверстие в полу и жгут.
В полу водительской кабины, через просверленное отверстие, протягиваем жгут управления ПЛАНАРом, а потом вернём короб с подлокотником на место, закрыв тем самым отверстие в полу и жгут.
На панели закрепляем монтажную планку пульта. Пульт с завода поставляется с разобранным штекером, иначе пришлось бы сверлить в панели огромное отверстие. А так просверлив маленькое отверстие по одному протягиваем провода и потом собираем штекерный разъем согласно приложенной инструкции. И после соединяем штекеры с основным жгутом управления.
Теперь сборка электрики тоже полностью завершена.
Идем под капот и соединяем питающий жгут с клеммами АКБ.
Проверяем работу подогревателя.
В спящем, не рабочем режиме на пульте изредка мигает зелёный индикатор.
Нажимаем центральную кнопку, и ждем запуска подогревателя.
Вся процедура запуска уже запрограммирована и подогреватель сам должен выйти на рабочий режим. Когда подогреватель выйдет на штатный рабочий режим, индикатор будет гореть постоянно.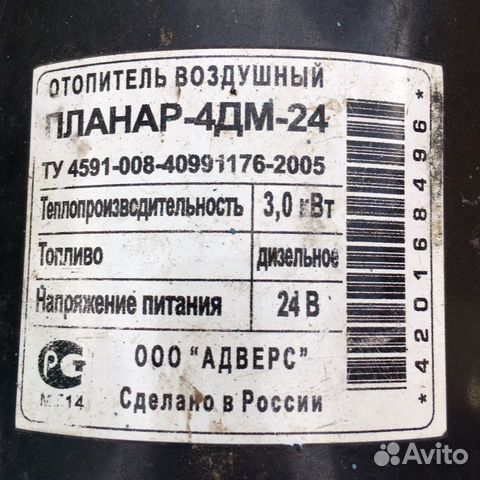 А в случае неисправности индикатор часто мигает и показывает код ошибки.
А в случае неисправности индикатор часто мигает и показывает код ошибки.
При первом запуске, когда топливная магистраль завоздушена никогда не получится запустить подогреватель с первого раза. Отработав положенное для запуска время, пульт выдаёт ошибку — отсутствие пламени. Игнорируем её и снова нажимаем кнопку запуска, снова включается процедура запрограммированная на заводе. В это время подкачивающий насос заполняет топливную магистраль горючим, выгоняя из неё воздух. После 3х — 4х попыток запуска ПЛАНАР-44Д запускается и штатно работает.
Из выхлопной трубы сначала появляется первый лёгкий дымок и уже через 1 минуту дыма уже невидно, только ощущается горячий выхлоп.
На этом установка завершена, ПЛАНАР-44Д отлично работает, наполняет салон горячим воздухом. А мы возвращаем на место сиденье в салоне автобуса и подлокотник на месте водителя.
Паспортный расход топлива ПЛАНАР-44Д на режимах:
max = 0,514 л/час
min = 0,120 л/час
Стоимость установки — по Акции 2016 года «Подготовь авто к зиме!» со скидкой -30% составила 5 200р.
Стоимость воздушного отопителя салона ПЛАНАР-44Д составила 23 500р. (на ноябрь 2016г.)
Дополнительные расх. материалы и доп. работы (провода, изолента, монтаж/демонтаж подлокотника) — 200р.
ИТОГО: 28 900р.
Коды ошибок для Webasto, Eberspacher, Планар
Коды ошибок Планар/Теплостар, Webasto, Eberspacher
-
-
-
Просмотров: 4980
Самодиагностика на автономках Планар и Теплостар реализована посредством индикации кода неисправности на дисплее или миганиями светодиода на аналоговом пульте управления.
Коды ошибок Планар 2D
| Количество миганий | Код неисправности | Описание ошибки |
| 1 | 1 | Высокая скорость роста температуры корпуса. Перегрев теплообменника. Перегрев теплообменника. |
| 12 | 2 | Перегрев в зоне блока управления отопителя. |
| 5 | 5 | Индикатор пламени. Обрыв. |
| 6 | 6 | Встроенный датчик температуры блока управления. Обрыв. |
| 4 | 9 | Неисправность свечи накала. |
| 11 | 10 | Неисправность нагнетателя воздуха. |
| 9 | 12 | Отключение отопителя по повышенному напряжению. |
| 2 | 13 | Попытки запуска исчерпаны. |
| 9 | 15 | Отключение отопителя по пониженному напряжению. |
| 10 | 16 | Индикатор пламени не остыл за время продувки отопителя. |
| 7 | 17 | Неисправность топливного насоса. |
| 8 | 20 | Нет связи между пультом и блоком управления отопителя. |
| 11 | 27 | Нагнетатель воздуха не вращается. |
| 11 | 28 | Нагнетатель воздуха вращается без управления. |
| 3 | 29 | Срыв пламени. Превышены попытки запуска. |
| — | 78 | Зафиксирован срыв пламени во время работы отопителя. |
Коды ошибок Планар 4Д/4ДМ/4ДМ2 (орган управления — аналоговый пульт)
| Количество миганий | Код неисправности | Описание ошибки |
| 1 | — | Перегрев теплообменника. |
| 2 | — | Попытки запуска исчерпаны. |
| 3 | — | Прерывание пламени. |
| 4 | — | Неисправность свечи накала. |
| 5 | — | Неисправность индикатора пламени. |
| 6 | — | Датчик температуры (блок управления). |
| 7 | — | Неисправность топливного насоса. |
| 8 | — | Нет связи между пультом и блоком управления отопителя. |
| 9 | — | Отключение отопителя по пониженному или повышенному напряжению |
| 10 | — | Превышено время на вентиляцию. |
| 11 | — | Неисправность двигателя нагнетателя воздуха в камеру сгорания. |
| 12 | — | Перегрев в зоне блока управления отопителя. |
Коды ошибок Планар 4DM2, Планар 44Д/44D/GP и Планар 8DM (орган управления — цифровой пульт)
| Количество миганий | Код неисправности | Описание ошибки |
| — | 01 | Перегрев теплообменника. |
| — | 02 | Возможный перегрев в зоне блока управления отопителя. |
| — | 04 | Неисправность датчика температуры блока управления отопителя. |
| — | 05 | Неисправность индикатора пламени. |
| — | 08 | Зафиксирован срыв пламени во время работы отопителя. |
| — | 09 | Неисправность свечи накаливания. |
| — | 10 | Неисправность мотора нагнетателя воздуха. |
| — | 12 | Отключение отопителя по повышенному напряжению. |
| — | 13 | Попытки запуска исчерпаны. |
| — | 15 | Отключение отопителя по пониженному напряжению. |
| — | 16 | Превышено время на вентиляцию. |
| — | 17 | Неисправность топливного насоса. |
| — | 20 | Нет связи между пультом и блоком управления отопителя. |
| — | 27 | Нагнетатель воздуха не вращается. |
| — | 28 | Нагнетатель воздуха вращается без управления. |
| — | 30 | Срыв пламени. Просадка напряжения. |
| — | 31 (для Планар 8DM) | Перегрев по датчику температуры. |
| — | 32 (для Планар 8DM) | Неисправность датчика температуры. |
| — | 33 (для Планар 8DM) | Отопитель заблокирован. |
Коды ошибок для отопителей Webasto выдаются либо на цифровой пульт в виде FXX (xx — номер неисправности), либо количеством длинных морганий светодиода на регуляторе температуры.
Коды ошибок Webasto Air Top 2000/2000S, Air Top 3500, Air Top 5000
| Количество миганий | Код неисправности | Описание ошибки |
| 0 | f00 | Ошибок нет (для 3500/5000 неисправность блока управления). |
| 1 | f01 | Отсутствует запуск отопителя после двух попыток (для 3500/5000 не образуется пламя). |
| 2 | f02 | Обрыв пламени. |
| 3 | f03 | Падение или превышение напряжения. |
| 4 | f04 | Преждевременное обнаружение пламени. |
| 5 | f05 | Обрыв цепи или короткое замыкание датчика пламени (для 2000/2000S). |
| 6 | f06 | Обрыв цепи или короткое замыкание датчика температуры. |
| 7 | f07 | Обрыв цепи или короткое замыкание дозирующего насоса. |
| 8 | f08 | Обрыв цепи, короткое замыкание или неправильное число оборотов мотора нагнетателя воздуха. |
| 9 | f09 | Обрыв цепи или короткое замыкание штифта накаливания/датчика пламени. |
| 10 | f10 | Перегрев отопителя. |
| 11 | f11 | Обрыв цепи или короткое замыкание ограничителя нагрева (для 3500/5000). |
| 12 | f12 | Обрыв цепи или короткое замыкание контрольного термостата (для 3500/5000). |
Коды ошибок Webasto Air Top 2000ST, Air Top 3500ST, Air Top 5000ST
| Количество миганий | Код неисправности | Описание ошибки |
| 0 | f00 | Неисправность блока управления. |
| 1 | f01 | Две неудачных попытки запуска или не обнаружено пламя. |
| 2 | f02 | Обрыв пламени. |
| 3 | f03 | Падение или превышение напряжения. |
| 4 | f04 | Преждевременное обнаружение пламени. |
| 5 | f05 | Обрыв цепи или короткое замыкание датчика пламени (только для 2000ST бензин). |
| 6 | f06 | Обрыв цепи или короткое замыкание датчика температуры. |
| 7 | f07 | Обрыв цепи или короткое замыкание дозирующего насоса. |
| 8 | f08 | Обрыв цепи или короткое замыкание мотора нагнетателя воздуха, перегрузка или блокировка крыльчатки нагнетателя воздуха |
| 9 | f09 | Обрыв цепи или короткое замыкание штифта накаливания. |
| 10 | f10 | Перегрев отопителя. |
| 11 | f11 | Обрыв цепи или короткое замыкание ограничителя нагрева. |
| 12 | f12 | Блокировка отопителя. |
| 14 | f14 | Неправильное положение датчика перегрева. |
| 15 | f15 | Обрыв цепи или короткое замыкание потенциометра на органе управления. |
% PDF-1.4
%
1202 0 объект
>
endobj
xref
1202 91
0000000016 00000 н.
0000002175 00000 п.
0000002274 00000 н.
0000002773 00000 н.
0000002968 00000 н.
0000003305 00000 н.
0000003520 00000 н.
0000003542 00000 н.
0000003666 00000 н.
0000003688 00000 н.
0000003817 00000 н.
0000003839 00000 н.
0000003968 00000 н.
0000003990 00000 н.
0000004119 00000 п.
0000004141 00000 п.
0000004270 00000 н.
0000004292 00000 н.
0000004421 00000 н.
0000004443 00000 н.
0000004573 00000 н.
0000004610 00000 н.
0000004632 00000 н.
0000004760 00000 н.
0000004782 00000 н.
0000004909 00000 н.
0000004931 00000 н.
0000005058 00000 н.
0000005080 00000 н.
0000005208 00000 н.
0000005230 00000 н.
0000005357 00000 н.
0000005379 00000 п.
0000005507 00000 н.
0000005529 00000 п.
0000005657 00000 н.
0000005679 00000 н.
0000005809 00000 н.
0000005831 00000 н.
0000005961 00000 н.
0000005983 00000 п.
0000006113 00000 п.
0000006135 00000 н.
0000006263 00000 п.
0000006285 00000 п.
0000006414 00000 н.
0000006436 00000 н.
0000006565 00000 н.
0000006587 00000 н.
0000006680 00000 н.
0000006702 00000 н.
0000007008 00000 н.
0000007032 00000 н.
0000008717 00000 н.
0000008741 00000 н.
0000012380 00000 п.
0000012403 00000 п.
0000013545 00000 п.
0000013569 00000 п.
0000019688 00000 п.
0000019712 00000 п.
0000027895 00000 п.
0000027919 00000 п.
0000036650 00000 п.
0000036675 00000 п.
0000046934 00000 п.
0000046959 00000 п.
0000057576 00000 п.
0000057600 00000 п.
0000065221 00000 п.
0000065245 00000 п.
0000075007 00000 п.
0000075031 00000 п.
0000084210 00000 п.
0000084234 00000 п.
0000094026 00000 п.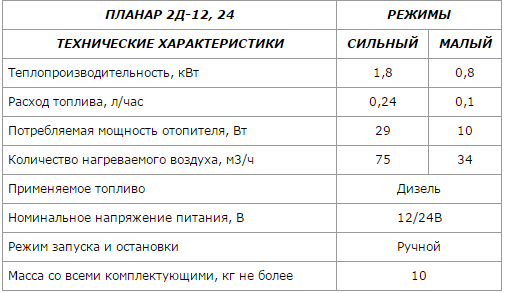
0000094050 00000 п.
0000101404 00000 п.
0000101428 00000 н.
0000110229 00000 п.
0000110253 00000 н.
0000118554 00000 н.
0000118578 00000 н.
0000124089 00000 н.
0000124111 00000 н.
0000124445 00000 н.
0000124467 00000 н.
0000124771 00000 н.
0000124793 00000 н.
0000002429 00000 н.
0000002750 00000 н.
трейлер
]
>>
startxref
0
%% EOF
1203 0 объект
>
endobj
1204 0 объект
> / Кодировка> >>
/ DA (/ Helv 0 Tf 0 г)
>>
endobj
1291 0 объект
>
транслировать
Hb`e`e`f`8uA @ lV P
Что такое плоские ошибки и как они влияют на точность линейных систем?
В идеальном мире система линейного перемещения будет демонстрировать идеально ровное прямолинейное движение и каждый раз достигать заданного положения с нулевой ошибкой.Но даже линейные направляющие и приводы высочайшей точности (винты, зубчатые передачи, ремни, линейные двигатели) имеют некоторые ошибки, связанные с допусками на обработку, обращением, монтажом и даже способом их применения.
В системах линейного перемещения обнаруживаются ошибки трех типов — линейные ошибки, угловые ошибки и плоские ошибки — и каждый тип по-разному влияет на систему и приложение. Чтобы не платить за высокоточные компоненты там, где они не нужны, или чтобы не получить систему, не отвечающую требованиям приложения, важно понимать разницу между этими тремя типами ошибок линейного движения и их причины.
Чтобы не платить за высокоточные компоненты там, где они не нужны, или чтобы не получить систему, не отвечающую требованиям приложения, важно понимать разницу между этими тремя типами ошибок линейного движения и их причины.
Линейные ошибки
Линейные ошибки включают точность позиционирования и повторяемость. Эти ошибки иногда называют ошибками позиционирования, потому что они определяют способность системы достичь желаемого положения. В контексте линейных систем термин «точность» обычно относится к точности позиционирования, которая представляет собой отклонение между целевым положением и положением, достигнутым системой. Повторяемость означает, насколько хорошо система возвращается в одно и то же положение за несколько попыток.Основной причиной линейных погрешностей является приводной механизм (например, винт, зубчатая рейка или линейный двигатель), но настройка системы также может повлиять на ее способность точно и многократно достигать заданного положения.
Линейные ошибки — точность и повторяемость — являются наиболее часто задаваемыми ошибками в системах линейного перемещения.
Изображение предоставлено: Parker Hannifin
Угловые ошибки
Угловые ошибки — это ошибки, при которых интересующая точка вращается вокруг оси.Обычно они называются ошибками крена, тангажа и рыскания, обозначающими вращение вокруг оси X, Y или Z соответственно. Если интересующей вас точкой является центр таблицы или слайда, угловые ошибки могут не оказать существенного влияния на приложение. Но когда интересующий объект находится на некотором расстоянии от стола или суппорта, ошибки Аббе, которые представляют собой угловые ошибки, усиленные расстоянием, могут привести к нежелательным результатам, особенно при обработке, измерении и сборке. Основные причины угловых ошибок и, как следствие, ошибок Аббе — неточности линейных направляющих и плохо обработанные монтажные поверхности.
Угловые ошибки — это ошибки, связанные с вращением вокруг оси. Эти ошибки могут нанести серьезный ущерб приложениям для обработки, измерения и сборки, особенно если они умножены на расстояние между источником ошибки и интересующей точкой.
Изображение предоставлено: Bosch Rexroth Corp.
Плоские ошибки
Плоские ошибки, часто называемые «прямолинейностью» и «плоскостностью», возникают во время движения системы, но вместо вращения вокруг оси, плоские ошибки представляют собой отклонения от идеальной прямой базовой плоскости.Прямолинейность определяет степень движения по оси Y при движении системы по оси X. Точно так же плоскостность определяет степень движения по оси Z, когда система движется по оси X.
Плоские погрешности — это отклонения в перемещении в горизонтальной плоскости (прямолинейность) и в вертикальной плоскости (плоскостность).
Изображение предоставлено: Newport Corporation
Обратите внимание на то, что точкой отсчета является ось перемещения (обычно ось X), поэтому существует только два типа плоских ошибок, связанных с перемещением по оставшимся двум осям.
Плоские ошибки вредны для таких приложений, как дозирование, механическая обработка или измерение, где поведение системы во время движения является критическим. В многокоординатных системах плоские ошибки в одной оси влияют на соседнюю ось (или оси), особенно когда оси «сложены», например, в таблицах X-Y, плоских таблицах и некоторых декартовых системах.
В многокоординатных системах плоские ошибки в одной оси влияют на соседнюю ось (или оси), особенно когда оси «сложены», например, в таблицах X-Y, плоских таблицах и некоторых декартовых системах.
Источники ошибок в плоских измерениях ближнего поля
Контекст 1
… может быть достигнуто путем перемещения датчика и антенны вместе относительно комнаты (см. Рисунок 11).nI, где B m — измеренные данные ближнего поля, B — данные ближнего поля без ошибок и e — член ошибки из-за номера источника ошибки n в таблице 1. …
Контекст 2
… раздел обобщает известные модели ошибок для оценки ошибок дальнего поля в диаграмме направленности испытательной антенны из-за допусков в калибровке диаграммы направленности дальнего поля зонда. «Эти ошибки классифицируются как Группа 1 в I Таблице 1, и их влияние постоянно при движении сканирования. …
Контекст 3
… источники ошибок измерения NF в группах 1-3 (таблица 1) создают ошибки боковых лепестков FF, которые обратно пропорциональны относительному уровню безошибочных боковых лепестков при тестировании. Рисунок 19 суммирует форму ошибки границы дальнего поля для этих групп ошибок сканирования NF. …
Рисунок 19 суммирует форму ошибки границы дальнего поля для этих групп ошибок сканирования NF. …
Контекст 4
… предварительное влияние взаимодействий первого порядка на точность усиления дальнего поля. Случайная ошибка измерения Источники случайной ошибки измерения показаны в записях I группы I в таблице 1.Эти ошибки устанавливают пределы повторяемости во время плоского сканирования и, наконец, ограничивают точность измерения низких боковых лепестков, поскольку они определяют динамический диапазон РЧ. …
Контекст 5
… пунктирные диаграммы четко показывают систематически индуцированные доли ошибок в наложениях Z-зонда, но наложения A-зонда после коррекции зонда не показывают никаких свидетельств парных долей ошибок с точностью ограничения повторяемости. Наконец, данные в таблице 9 Три косинусоидальные амплитудные ошибки приемника были синтетически введены в измеренные данные NF, коэффициенты нелинейности и периодичности которых приведены в таблице 10. Для спектра A-зонда (нормированного на пик для зонда с открытым концом) исчезающие боковые лепестки имеют случайные пики ниже -90 дБ. …
Для спектра A-зонда (нормированного на пик для зонда с открытым концом) исчезающие боковые лепестки имеют случайные пики ниже -90 дБ. …
Context 6
… исключая эти области гребня, мы можем вычислить среднеквадратичные значения по всем оставшимся кратковременным волновым числам и представить отношения S / N 0, которые можно сравнить с прогнозами, сделанными в разделе 3.7. Таблица 11 ниже содержит эти измеренные отношения шума на основе имеющихся результатов сканирования с помощью трех датчиков и двух массивов DESAT.уровень ошибки * и подтверждает, что основной причиной случайной ошибки в NBS DESAT является ошибка округления сигнала оцифровки. …
Контекст 7
… Тесное соответствие среднеквадратичного значения спектра ошибок SCAT с измеренными кратковременными средними значениями в таблице 11 свидетельствует о полезности обеих процедур тестирования случайных ошибок и подтверждает основные пределы точности измерений. для тестирования AWACS в NBS. Предел ошибки SCAT -94 дБ (…
для тестирования AWACS в NBS. Предел ошибки SCAT -94 дБ (…
(PDF) Моделирование ошибок и экспериментальная проверка плоского параллельного манипулятора 3-PPR с зазорами
, найденные как:
εθi = εθ = 0.0012 рад, i = 1,2,3
εr1 = 0,039 мм, εr2 = 0,036 мм, εr3 = 0,037 мм
5.2 Задать ошибки МП. Измерения проводились с двумя корпусами:
с двумя коробками:
Случай 1: корпус только с зазорами в пассивных призматических
шарнирах
Случай 2: корпус с зазорами как в пассивных призматических, так и в
поворотных шарнирах
два случая были физически реализованы с двумя различными формами
для движущейся платформы в разд. 2, соответственно, а именно равносторонний треугольник
MP (△-образная MP) и дискообразная MP (# —
shape MP), которые связаны со случаями 1 и 2.Сначала мы зафиксировали
на MP калибровочной бумаге с отметками 2 × 2 с интервалом 2 см.
в случае 1. Затем были измерены i × равномерно распределенные точки
во всем декартовом рабочем пространстве манипулятора. Во время измерений
Во время измерений
приводы были заблокированы для устранения ошибок
в приводах. В точке (i, j) MP слегка толкали
в двух направлениях по оси x, оси y и вращали вокруг оси z,
соответственно.Соответствующие показания были отмечены как (x, y, ϕ) i j
+ t
и (x, y, ϕ) ij
−t, t∈ {x, y, r} соответственно. Измеренные ошибки позиционирования
и ориентации в точке (i, j) определяются как:
δxi j = max xi j
+ t, xi j
−t − minxi j
+ t , xi j
−t (23a)
δyi j = max yi j
+ t, yi j
−t − min yi j
+ t, yi j
−t ( 23b)
δϕi j = max ϕi j
+ t, ϕi j
−t − min ϕi j
+ t, ϕi j
−t (23c)
δpi j = max δpi j
t, δpi j
t = (xi j
+ t − xi j
−t) 2+ (yi j
+ t − yi j
−t) 2 (23d)
6 Результаты и обсуждение
В этом разделе представлены прогнозируемые максимальные ошибки позы из модели
и измеренные ошибки из экспериментов, а также сравнение
.
6.1 Распределение ошибок для случая 1. На рисунке 9 показано
распределение ошибок движущейся платформы для данной ориентации
ϕ = 0. Рисунок 9 (a) показывает, что смоделированное значение δxmax является постоянным для
данной координаты y и слегка уменьшается с координатой y.
δxmax ограничено между 0,196 мм и 0,256 мм, тогда как δymax
и δϕmax оба постоянны, их значения равны 0,100 мм
и 0,221 градуса, соответственно.Координата Y точки P, геометрический центр MP
и ориентация MP зависят
только от первого и второго призматических приводов из-за парциальной развязки движения манипулятора. Следовательно, максимальная погрешность положения MP
mum по оси y и максимальная ошибка вращения
возникают, когда ∆τbi, i = 1,2, достигают своих нижних или верхних границ
. В результате и δymax, и δϕmax остаются постоянными на протяжении
вне декартовой рабочей области манипулятора.Из рис. 9 (c)
очевидно, что максимальная ошибка позиционирования δpmax MP составляет
симметрично относительно оси x. Среднеквадратическое отклонение
Среднеквадратическое отклонение
(RMSD) между моделями и измерениями
равно 50 мкм, 30 мкм, 51 мкм и 0,057 градуса для δx, δy, δp и
δϕ, соответственно. Из Рис. 9 следует отметить хорошую корреляцию
между измеренными ошибками позиционирования и смоделированными
ошибками.С другой стороны, заметны отличия измеренных
ошибок ориентации МП от смоделированных.
В некоторой степени это связано с тем, что угловое измерение
более чувствительно к случайной ошибке и влиянию окружающей среды,
и т. Д., Чем измерение положения.
Распределения ошибок измерения с постоянной ориентацией
ϕ = π / 6 показаны на рис. 10. Смоделированные значения δxmax, показанные на рис.
.10 (а), изменяясь от 0,224 мм до 0,253 мм, имеет распределение, аналогичное распределению, соответствующему ϕ = 0, в то время как δymax остается постоянным вдоль оси y и постепенно увеличивается с координатой x ( см.
рис. 10 (b)), от 0,103 мм до 0,123 мм. На рис. 10 (d) смоделированная ошибка ориентации δϕmax постоянна и равна 0,264 градуса.
На рис. 10 (d) смоделированная ошибка ориентации δϕmax постоянна и равна 0,264 градуса.
Погрешность позиционирования δpmax, изменяющаяся от 0,226 мм до 0,268 мм,
увеличивается, когда точка измерения перемещается из верхнего левого угла
в правый нижний угол по всему рабочему пространству, как показано
на рис.10 (в). Значения RMSD между моделями и измерениями
δx, δy, δp и δϕ равны 47 мкм, 34 мкм, 34 мкм
и 0,103 градуса соответственно. Следовательно, измерения имеют хорошую корреляцию с результатами моделирования
.
6.2 Распределение ошибок для случая 2. В случае 2 учитываются как механический, так и поворотный шарнирные зазоры, равные
. Распределение
максимальных ошибок позы показано на рис. 11 и 12. По
сравнивая рис.11-9, можно обнаружить, что различия
между результатами моделирования и измерениями действительно зависят от
ориентации MP. Для ϕ = 0 значения RMSD между
моделированиями и измерениями равны 77 мкм, 62 мкм, 81 мкм
и 0,086 градуса для δx, δy, δp и δϕ, соответственно. Хотя разница
Хотя разница
между симуляциями и экспериментами на рис. 11 (b)
при заданных масштабах и единицах кажется больше, чем другие результаты,
, однако, максимальное значение составляет около 0.5 градусов и статистический анализ
также показывает, что разница приемлема.
Для ϕ = π / 6 значения RMSD между моделями и
измерениями δx, δy, δp и δϕ равны 26 мкм, 36 мкм,
34 мкм и 0,063 градуса соответственно. Обратите внимание, что корреляция между результатами моделирования и измерениями составляет
t, при
ϕ = π / 6 лучше, чем ϕ = 0.
6.3 Обсуждение результатов измерений. Как показано на рис. 13
, как для случаев 1, так и для случаев 2, ошибки измерения при
ϕ = π / 6 больше, чем при ϕ = 0, что согласуется с распределением
, полученным в результате моделирования.При этом эталонные
отклонений (SSD) измеренных ошибок ориентации равны
0,052, 0,029, 0,086 и 0,034 град соответственно. Это означает, что измеренные ошибки ориентации
Это означает, что измеренные ошибки ориентации
имеют очень небольшие колебания среди
дискретных точек. Характеристики позиционирования робота, а именно:
их точности, определяется в соответствии с ISO 9283: 1998 [23] как:
APp = δp, APϕ = δϕ (24)
где δp и δϕ — измеренные ошибки позы. определено в разд.5.2.
На рисунке 14 показана точность манипулятора, где измеренные точки
, покрывающие максимальное рабочее пространство, показаны
на рис. 12 (а). Точность положения в измеренных точках составляет 0,2 ~
0,35 мм, а точность ориентации — 0,2 ~ 0,45 град.
Эксперименты показывают, что большая часть измерений
проходит вдоль границ, установленных с помощью математической модели, за исключением
. Чтобы оценить сравнение между
и
моделированиями и измерениями, мы провели статистический регрессионный анализ
[24], как показано на рис.15 для случая 2 с постоянной ориентацией —
ϕ = π / 6. Большинство результатов моделирования распределены
Большинство результатов моделирования распределены
в диапазонах измеренных ошибок δmea ± 2Amea, за исключением ошибки ориентации
rors, где δmea — ошибка измерения, определенная в разд. 5.2 и
8
(IUCr) Роль ошибок одного элемента в плоских параболических составных преломляющих линзах
Ссылки
Алианелли, Л., Санчес-дель-Рио, М. и Сони, К. Дж. С. (2007). Spectrochim.Acta B , 62 , 593–597. Web of Science CrossRef Google Scholar
Андрейчук А., Сакураи Ю. и Итоу М. (2006). IPAP Conf. Сер. 7 , 162–164. CAS Google Scholar
Андрейчук А., Сакураи Ю. и Итоу М. (2007). AIP Conf. Proc. 879 , 994–997. CrossRef CAS Google Scholar
Аристов, В. В., Григорьев, М., Кузнецов, С. М., Шабельников, Л. Г., Юнкин, В. А., Хоффманн, М., Фогес, Э. (2000). Опт.Commun. 177 , 33–38. Web of Science CrossRef CAS Google Scholar
Артемьев, А.Н., Снигирев, А.А., Кон, В., Снигирева, И.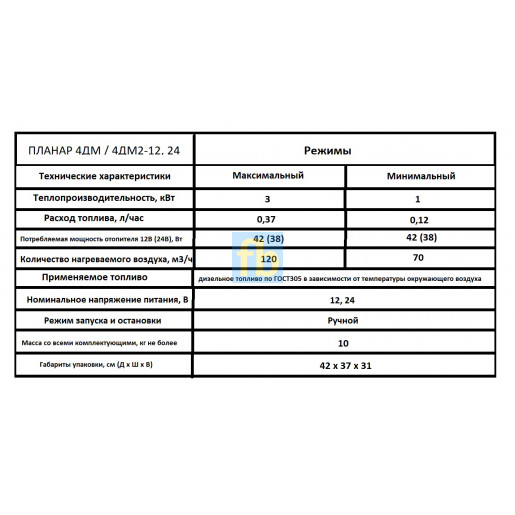 , Артемьев, Н., Григорьев, М., Передков, С., Гликин, Л., Левтонов, М. , Квардаков, В., Забелин, А., Маевский, А. (2005). Nucl. Instrum. Методы. Phys. Res. А , 543 , 322–325. Web of Science CrossRef CAS Google Scholar
, Артемьев, Н., Григорьев, М., Передков, С., Гликин, Л., Левтонов, М. , Квардаков, В., Забелин, А., Маевский, А. (2005). Nucl. Instrum. Методы. Phys. Res. А , 543 , 322–325. Web of Science CrossRef CAS Google Scholar
Bobrowicz, F. W., Lynch, J. E., Fisher, K. J. & Tabor, J. E. (1984). Параллельные вычисления. 1 , 295–305. CrossRef Web of Science Google Scholar
Cederström, B., Lundqvist, M. & Ribbing, C. (2002). Заявл. Phys. Lett. 81 , 1399–1401. Web of Science CrossRef CAS Google Scholar
Дудчик Ю. И., Колчевский Н. Н., Комаров Ф. Ф., Кохмура Ю., Авадзи М., Судзуки Ю. и Ишикава Т. (2000). Nucl. Instrum. Методы. Phys. Res. А , 454 , 512–519. Web of Science CrossRef CAS Google Scholar
Дудчик Ю.И., Колчевский, Н. Н., Комаров, Ф. Ф., Пиеструп, М. А., Кремер, Дж. Т., Гэри, К. К. и Пантелл, Р. Х. (2003). Proc. SPIE , 5194 , 56–61. CrossRef Google Scholar
Elleaume, P. (1998). Nucl. Instrum. Методы. Phys. Res. А , 412 , 483–506. Web of Science CrossRef CAS Google Scholar
Instrum. Методы. Phys. Res. А , 412 , 483–506. Web of Science CrossRef CAS Google Scholar
Evans-Lutterodt, K., Ablett, JM, Stein, A., Kao, Chi-Chang, Tennant, DM, Klemens, F., Taylor, A., Jacobsen, C., Gammel , П.Л., Хаггинс, Х., Устин, С., Богарт, Г. и Окола, Л. (2003). Опт. Экспресс , 11 , 919–926. Web of Science CrossRef PubMed Google Scholar
Хуанг, К., Му, Б., Ван, З., Чен, Л. и Дудчик, Ю. И. (2009). Nucl. Instrum. Методы. Phys. Res. А , 602 , 446–449. Web of Science CrossRef CAS Google Scholar
Jark, W., Pérennès, F., Matteucci, M., Mancini, L., Montanari, F., Rigon, L., Tromba, G., Somogyi, A., Tucoulou, Р. и Бохик, С. (2004). J. Synchrotron Rad. 11 , 248–253. Web of Science CrossRef CAS IUCr Journals Google Scholar
Lengeler, B., Schroer, CG, Benner, B., Guenzler, TF, Kuhlmann, M., Tümmler, J., Simionovici, AS, Drakopoulos, M., Snigirev, AA И Снигирева И. (2001). Nucl. Instrum. Методы. Phys. Res. А , 467 – 468 , 944–950. Web of Science CrossRef CAS Google Scholar
Res. А , 467 – 468 , 944–950. Web of Science CrossRef CAS Google Scholar
Lengeler, B., Schroer, C.G., Kuhlmann, M., Benner, B., Guenzler, T.F., Kurapova, O., Зонтоне, Ф., Снигирев, А.А., Снигирева, И. (2005). J. Phys. D , 38 , A218 – A222. Web of Science CrossRef CAS Google Scholar
Lengeler, B., Tümmler, J., Snigirev, A.A., Snigireva, I. & Raven, C. (1998). J. Appl. Phys. 84 , 5855–5861. Web of Science CrossRef CAS Google Scholar
МакМестер, В. Х., Керр Дель Ганде, Н., Маллет, Дж. Х. и Хаббелл, Дж. Х. (1969). Сборник рентгеновских поперечных сечений , UCRL-50174, Радиационная лаборатория Лоуренса, Калифорнийский университет, США.Google Scholar
Назмов В., Резникова Е., Снигирев А.А., Снигирева И., ДиМихил М., Григорьев М., Мор Дж., Маттис Б. и Саиле В. (2005). Микросист. Technol. 11 , 292–297. Web of Science CrossRef CAS Google Scholar
Назмов, В., Резникова, Э., Сомоги, А., Ласт, А. , Мор, Дж., Сайле, В., Саймон, Р., ДиМихил, М. (2007) . AIP Conf. Proc. 879 , 770–773. CrossRef Google Scholar
, Мор, Дж., Сайле, В., Саймон, Р., ДиМихил, М. (2007) . AIP Conf. Proc. 879 , 770–773. CrossRef Google Scholar
Nöhammer, B., David, C., Rothuizen, H., Хошовска Дж. И Симионовичи А. С. (2003). Microelectron. Англ. 67 — 68 , 453–460. Google Scholar
Пантелл, Р. Х., Файнштейн, Дж., Бегуристейн, Х. Р., Пиеструп, М. А., Гэри, К. К. и Кремер, Дж. Т. (2001, , ). Rev. Sci. Instrum. 72 , 48–52. Web of Science CrossRef CAS Google Scholar
Пантелл, Р. Х., Файнштейн, Дж., Бегуристейн, Х. Р., Пиеструп, М. А., Гэри, К. К. и Кремер, Дж. Т. (2001, , b ). Заявл. Опт. 40 , 5100–5105. Web of Science CrossRef PubMed CAS Google Scholar
Пиеструп М.А., Пантелл Р. Х. и Кремер Дж. Т. (2001). Патент США 6269145 B1. Google Scholar
Протопопов В. В. (1999). Опт. Commun. 172 , 113–124. Web of Science CrossRef CAS Google Scholar
Шроер, К. Г., Тюммлер, Дж., Ленгелер, Б., Дракопулос, М. , Снигирев, А. А., Снигирева, И. (2001). Proc. SPIE , 4143 , 60.CrossRef Google Scholar
, Снигирев, А. А., Снигирева, И. (2001). Proc. SPIE , 4143 , 60.CrossRef Google Scholar
Снигирев А.А., Снигирева И. (2008). C. R. Phys. 9 , 507–516. Web of Science CrossRef CAS Google Scholar
Умбах, М., Назмов, В., Саймон, М., Ласт, А. и Саиле, В. (2008). Proc. SPIE , 7077 , 70770G. CrossRef Google Scholar
Оценка функциональных методов определения центра сустава для квазиплоского движения
Abstract
Функциональные методы определяют центры суставов как центры вращения (CoR) двух смежных движений во время произвольного движения.Эти методы использовались для функционального определения центра тазобедренного сустава при анализе походки и выявили преимущества по сравнению с методами прогнозирующей регрессии. Однако текущая реализация функциональных методов препятствует их применению в клинической практике, когда субъекты испытывают трудности при выполнении многоплоскостных движений в требуемом диапазоне. В этом исследовании мы систематически исследовали, можно ли использовать функциональные методы для локализации CoR во время квазиплоского движения. Было проанализировано влияние следующих факторов: алгоритмы, дальность и скорость движения, расположение кластера маркеров, размер кластера маркеров и расстояние до центра сустава.В нашем исследовании использовалась механическая связь, чтобы изолировать интересующие факторы и дать представление об изменениях в реализации функциональных методов. Наши результаты показали, что алгоритмы и расположение кластеров существенно повлияли на результаты оценки. Для всех алгоритмов наблюдалась достоверно положительная взаимосвязь между ошибками CoR и расстоянием между координатами проксимального кластера до центра сустава в медиально-латеральном направлении, в то время как дистальные кластеры маркеров лучше всего располагались как можно ближе к центру сустава.Путем оптимизации аналитических и экспериментальных факторов алгоритмы преобразования достигли среднеквадратичной ошибки (RMSE) 5,3 мм, в то время как методы подбора сфер дали наилучшую оценку со RMSE 2,6 мм.
В этом исследовании мы систематически исследовали, можно ли использовать функциональные методы для локализации CoR во время квазиплоского движения. Было проанализировано влияние следующих факторов: алгоритмы, дальность и скорость движения, расположение кластера маркеров, размер кластера маркеров и расстояние до центра сустава.В нашем исследовании использовалась механическая связь, чтобы изолировать интересующие факторы и дать представление об изменениях в реализации функциональных методов. Наши результаты показали, что алгоритмы и расположение кластеров существенно повлияли на результаты оценки. Для всех алгоритмов наблюдалась достоверно положительная взаимосвязь между ошибками CoR и расстоянием между координатами проксимального кластера до центра сустава в медиально-латеральном направлении, в то время как дистальные кластеры маркеров лучше всего располагались как можно ближе к центру сустава.Путем оптимизации аналитических и экспериментальных факторов алгоритмы преобразования достигли среднеквадратичной ошибки (RMSE) 5,3 мм, в то время как методы подбора сфер дали наилучшую оценку со RMSE 2,6 мм. Алгоритмы преобразования работали лучше при наличии случайного шума и имитированных артефактов мягких тканей.
Алгоритмы преобразования работали лучше при наличии случайного шума и имитированных артефактов мягких тканей.
Образец цитирования: Meng L, Childs C, Buis A (2019) Оценка функциональных методов определения центра сустава для квазиплоского движения. PLoS ONE 14 (1):
e0210807.https://doi.org/10.1371/journal.pone.0210807
Редактор: Елена Бергамини,
Римский университет, ИТАЛИЯ
Поступила: 14.05.2018; Дата принятия: 2 января 2019 г .; Опубликован: 17 января 2019 г.
Авторские права: © 2019 Meng et al. Это статья в открытом доступе, распространяемая в соответствии с условиями лицензии Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии указания автора и источника.
Доступность данных: Все файлы данных доступны из набора данных Strathclyde (http://dx. doi.org/10.15129/377572e1-ca31-4028-8062-77a1ca3a3567).
doi.org/10.15129/377572e1-ca31-4028-8062-77a1ca3a3567).
Финансирование: Исследование финансировалось грантом Исследовательского совета по инженерным и физическим наукам (EPSRC) «Носимая мягкая робототехника для самостоятельной жизни» EP / M026388 / 1 и Директорами здравоохранения правительства Шотландии. Финансирующие организации не играли никакой роли в дизайне исследования, сборе и анализе данных, принятии решения о публикации или подготовке рукописи.
Конкурирующие интересы: Авторы заявили об отсутствии конкурирующих интересов.
Введение
Анализ походки полезен для понимания патологических паттернов движений и оценки эффективности терапевтических вмешательств. Прогнозы модели совместной кинематики продемонстрировали особую чувствительность к местоположению суставных центров [1]. Ошибки в локализации центра сустава приведут к существенным неточностям в кинематических и кинетических расчетах и, таким образом, повлияют на интерпретацию оценщика. Традиционные модели походки определяют центры суставов на основе расположения маркеров на идентифицируемых анатомических ориентирах. Точность идентификации ориентира зависит от опыта, знаний и опыта пользователей. Cappozzo [2] предложил функциональный подход к локализации центра тазобедренного сустава (HJC), при котором фиксированный центр вращения (CoR) между бедренной костью и тазом определяется по относительному вращению двух сегментов. Этот метод показал потенциал для уменьшения зависимости от анатомических ориентиров в традиционных моделях походки.
Традиционные модели походки определяют центры суставов на основе расположения маркеров на идентифицируемых анатомических ориентирах. Точность идентификации ориентира зависит от опыта, знаний и опыта пользователей. Cappozzo [2] предложил функциональный подход к локализации центра тазобедренного сустава (HJC), при котором фиксированный центр вращения (CoR) между бедренной костью и тазом определяется по относительному вращению двух сегментов. Этот метод показал потенциал для уменьшения зависимости от анатомических ориентиров в традиционных моделях походки.
Были предприняты попытки оценить точность функциональных методов локализации HJC в моделировании [3–5], исследованиях in vitro [6] и in vivo на людях [7–9]. Использование подходов моделирования дает практические рекомендации по использованию функциональных методов на людях [5, 10]. Camomilla et al. [5] предположили, что движение звезда-дуга может быть предпочтительным для достижения оптимальной оценки с диапазоном движения более 30 градусов, что было широко адаптировано в исследованиях на людях. Превосходство функциональных методов над методами предсказательной регрессии для оценки HJC было доказано в исследованиях на людях in vivo [9, 11, 12]. Функциональные методы достигли лучшего согласования с HJC, измеренным при двойной рентгеноскопии (11,0 ± 3,3 мм), чем методы прогнозирования (18,1 ± 9,5 мм) в исследовании с участием здоровых субъектов [9]. На точность функциональных методов может повлиять уменьшенный диапазон движения (RoM) [13, 14], количество циклов [4], алгоритмы [14] и расположение маркеров [8]. Точность локализации HJC зависит от характера движения бедра [4].Piazza et al. [7] продемонстрировали, что плоское движение бедра дает наихудшую оценку HJC у человека (~ 70 мм), и пришли к выводу, что характер движения важен для функционального определения HJC. Полное исследование всех степеней свободы тазобедренного сустава улучшило бы эффективность функционального метода [15]. Требование определенного движения бедра ограничивает применение функциональных методов к предметам с ограниченной плоскостью движения.
Превосходство функциональных методов над методами предсказательной регрессии для оценки HJC было доказано в исследованиях на людях in vivo [9, 11, 12]. Функциональные методы достигли лучшего согласования с HJC, измеренным при двойной рентгеноскопии (11,0 ± 3,3 мм), чем методы прогнозирования (18,1 ± 9,5 мм) в исследовании с участием здоровых субъектов [9]. На точность функциональных методов может повлиять уменьшенный диапазон движения (RoM) [13, 14], количество циклов [4], алгоритмы [14] и расположение маркеров [8]. Точность локализации HJC зависит от характера движения бедра [4].Piazza et al. [7] продемонстрировали, что плоское движение бедра дает наихудшую оценку HJC у человека (~ 70 мм), и пришли к выводу, что характер движения важен для функционального определения HJC. Полное исследование всех степеней свободы тазобедренного сустава улучшило бы эффективность функционального метода [15]. Требование определенного движения бедра ограничивает применение функциональных методов к предметам с ограниченной плоскостью движения.
Пара исследований механического моделирования показала, что функциональные методы позволяют получить хорошую оценку HJC, когда движение ограничено в сагиттальной плоскости.Piazza et al. [10] продемонстрировали, что плоское движение бедра с диапазоном 30 градусов существенно не влияет на точность определения местоположения HJC. Siston et al. [16] сообщили о схожих результатах, что функциональный метод позволил получить оценку CoR со средней ошибкой 4,3 ± 1,3 мм для того же движения бедра. Следует отметить, что при чисто плоском движении алгоритмы теоретически не могут определить HJC в направлении, перпендикулярном плоскости движения. Siston et al. [16] объяснили, что они смогли достичь уникальных решений с помощью обоих алгоритмов из-за некоторого движения вне плоскости.Это говорит о том, что функциональные методы могут определять HJC по квази-одиночному плоскому движению. Тогда возникает вопрос, какие факторы влияют на выполнение оценки HJC со сагиттальным движением бедра, что приводит к худшей оценке HJC у людей [7]. Насколько известно авторам, факторы, влияющие на точность локализации HJC, систематически не изучались для этого конкретного сценария. Тщательное исследование поможет улучшить протокол определения HJC и сделать функциональные методы более подходящими для пациентов с двигательными нарушениями.
Насколько известно авторам, факторы, влияющие на точность локализации HJC, систематически не изучались для этого конкретного сценария. Тщательное исследование поможет улучшить протокол определения HJC и сделать функциональные методы более подходящими для пациентов с двигательными нарушениями.
Цель данной статьи — получить полное представление о том, как реализация функциональных методов влияет на оценку CoR во время квазиплоского движения. С помощью механической связи, на которой можно легко измерить центр сустава, были исследованы различные факторы, включая функциональные методы, диапазон движения, скорость движения, расположение кластера маркеров, размер кластера маркеров и расстояние до сустава. Влияние изменения локальной системы координат и размещения маркера на оценку CoR оценивалось с помощью четырех различных функциональных методов и с введением шума в траектории маркеров.Результаты сравнивались и анализировались, чтобы обобщить выводы о применении функциональных методов.
Материалы и методы
Мы провели серию экспериментов с двумя жесткими сегментами, которые были соединены шарнирным соединением, как показано на рис. 1. Проксимальный сегмент был установлен на стойке и оставался неподвижным, в то время как дистальный сегмент вращался вокруг сустава вручную. так что может быть произведено квазиплоское движение. Кластеры маркеров были сконструированы из четырех световозвращающих маркеров (диаметром 14 мм), прикрепленных к жесткой пластине.Использовались жесткие маркерные кластеры двух размеров. Большие кластеры были прикреплены к передней и боковой стороне проксимального сегмента, а маленькие — на передней и боковой стороне дистального сегмента (рис. 1). Система анализа движения Vicon с 12 камерами (Oxford Metrics; Великобритания) использовалась для записи трехмерных траекторий маркеров с частотой захвата 100 Гц. Все камеры располагались на расстоянии 3–5 м от объекта.
Рис 1. Механическое соединение с шарнирным соединением.
(A) Проксимальный сегмент был установлен на стойке и оставался неподвижным во время движения, в то время как дистальный сегмент вращался вручную вокруг сустава. К передней и боковой сторонам обоих сегментов прикрепляли кластеры маркеров. Центр сустава определяли с помощью двух маркеров, размещенных на двух сторонах сустава. (B) Совместные системы координат возникли на медиальном маркере. Медиально-латеральная ось (y) определялась как единичный вектор, направленный на маркер латерального сустава от медиального маркера, нижне-верхняя ось (z) была перпендикулярна y во фронтальной плоскости соответствующего сегмента в верхнем направлении, а ось x была пересечена. произведение осей y и z.
К передней и боковой сторонам обоих сегментов прикрепляли кластеры маркеров. Центр сустава определяли с помощью двух маркеров, размещенных на двух сторонах сустава. (B) Совместные системы координат возникли на медиальном маркере. Медиально-латеральная ось (y) определялась как единичный вектор, направленный на маркер латерального сустава от медиального маркера, нижне-верхняя ось (z) была перпендикулярна y во фронтальной плоскости соответствующего сегмента в верхнем направлении, а ось x была пересечена. произведение осей y и z.
https://doi.org/10.1371/journal.pone.0210807.g001
Дистальный сегмент перемещался по четырем схемам движения с разными скоростями и диапазонами движения: медленное нормальное, медленное чрезмерное, быстрое нормальное и быстрое чрезмерное соответственно (таблица 1). Штанга, прикрепленная к проксимальному сегменту, использовалась для ограничения диапазона движения до 45 градусов (нормальный) и 90 градусов (чрезмерный) путем регулировки высоты стержня. Скорость движения приблизительно контролировалась вручную. Каждая модель движения записывалась в течение 30 секунд и повторялась 5 раз.Эти движения повторялись при изменении размера кластера и расстояния (таблица 1).
Скорость движения приблизительно контролировалась вручную. Каждая модель движения записывалась в течение 30 секунд и повторялась 5 раз.Эти движения повторялись при изменении размера кластера и расстояния (таблица 1).
Были проанализированы четыре формальных метода. Два метода принадлежали к семейству подгонки сфер: подгонка геометрической сферы (GSF) [2, 3] и подгонка алгебраической сферой (ASF) с компенсацией смещения [17, 18], а два принадлежали к методам преобразования координат, методам преобразования центра (CTT) [ 7] и симметричной оценки центра вращения (SCoRE) [3]. Локальные системы координат были созданы с использованием трех маркеров каждого кластера для вычисления матриц 4 × 4, представляющих преобразование двух сегментов.В CTT и SCoRE была рассчитана однородная трансформация между проксимальным и дистальным сегментами, и CoR был определен с использованием этих трансформаций во время испытания движения. Для методов подбора сферы, после того, как положения маркеров на дистальных кластерах были перенесены в соответствующую проксимальную локальную координату, CoR находился путем подгонки сферы к положениям маркеров с использованием методов оптимизации наименьших квадратов. Для вычисления CoR было включено пять циклов движения. Поскольку был выбран один кластер на каждом сегменте, было четыре различных комбинации размещения кластеров (LL, LF, FL и FF).
Для вычисления CoR было включено пять циклов движения. Поскольку был выбран один кластер на каждом сегменте, было четыре различных комбинации размещения кластеров (LL, LF, FL и FF).
Один метод, одна модель движения, одно размещение кластера, один размер кластера и одно расстояние между кластерами были выбраны последовательно с различными модальностями. Сочетание этих характеристик позволило провести 128 различных тестов. Все вычисления проводились с использованием Matlab 2017a (MathWorks, Натик, Массачусетс, США). Центр сустава ( c ) был определен как средняя точка двух маркеров, которые были прикреплены к сторонам сустава (рис. 1). Местоположение CoR ( c est ) оценивалось для каждого теста.Среднеквадратичная ошибка (RMSE) между оценкой CoR ( c est ) и эталонными местоположениями CoR ( c ) во всех кадрах была рассчитана в соответствии с уравнением 1.
(1)
где N — общий номер кадра.
Все тесты были проанализированы с помощью общей линейной модели, включая дисперсионный анализ (ANOVA) со следующими факторами: размещение кластера, диапазон перемещения, скорость движения, функциональные методы, расстояние до кластера и размер кластера. Одновременные тесты Бонферрони и групповой анализ были выполнены с целью дальнейшего исследования различий в модальностях при α <0.01.
Одновременные тесты Бонферрони и групповой анализ были выполнены с целью дальнейшего исследования различий в модальностях при α <0.01.
Чтобы исследовать влияние местоположения локальной координаты на оценку CoR, была оценена взаимосвязь между исходной точкой и ошибкой местоположения CoR. Совместные системы координат были созданы, как показано на рисунке 1B. Начало проксимальной системы координат изменяли с шагом 10 мм: по оси x (от 50 до 100 мм), оси y (от 0 до 150 мм) и оси z (от 0 до 200 мм). Функциональный CoR был вычислен четырьмя различными методами при изменении положения проксимальных координат.Изменение начала дистальной координаты лежит в области, где значения по оси x лежат от -50 до 100 мм, значения по оси y от 0 до 150 мм, а значения z находятся в диапазоне от -200 до 0 мм с шаг 10 мм. CTT и SCoRE вычислили CoR с использованием новых преобразований после смещения начала дистальной координаты. Поскольку для алгоритмов подбора сферы требуются маркерные траектории на дистальном сегменте, вместо этого исследовалось расстояние от центроида маркера до центра сустава. Набор маркеров был случайным образом выбран из восьми маркеров переднего и бокового дистального кластеров. Выбор маркера следует двум предпосылкам: 1) было выбрано не менее трех маркеров; 2) хотя бы один маркер был выбран из каждого кластера. Было доступно 208 комбинаций маркеров, и были рассчитаны соответствующие им расстояния от центра тяжести маркера до центра сустава. Значения расстояния были упорядочены от наименьшего к наибольшему и затем присвоены нормализованный вес. Коэффициент корреляции Пирсона использовался для определения корреляции между проксимальными / дистальными координатами / положением маркеров и результатами RMSE со значимым уровнем, установленным на 0.05.
Набор маркеров был случайным образом выбран из восьми маркеров переднего и бокового дистального кластеров. Выбор маркера следует двум предпосылкам: 1) было выбрано не менее трех маркеров; 2) хотя бы один маркер был выбран из каждого кластера. Было доступно 208 комбинаций маркеров, и были рассчитаны соответствующие им расстояния от центра тяжести маркера до центра сустава. Значения расстояния были упорядочены от наименьшего к наибольшему и затем присвоены нормализованный вес. Коэффициент корреляции Пирсона использовался для определения корреляции между проксимальными / дистальными координатами / положением маркеров и результатами RMSE со значимым уровнем, установленным на 0.05.
Шум был введен для моделирования артефактов мягких тканей (STA), влияющих на траектории маркеров, и была проверена чувствительность функциональных методов. В первой части случайный гауссов шум различной амплитуды (5, 10, 15 и 20 мм) был введен в качестве источника шума в нашем исследовании. Исследование показало, что более 90% измеренных компонентов STA находится в диапазоне частот 0 ~ 10 Гц [19]. Фильтр нижних частот Баттерворта четвертого порядка с частотой среза 10 Гц использовался для удаления избыточного высокочастотного шума.Исследования показали, что STA зависит от площади сегмента, на котором расположен конкретный маркер, антропометрии объекта и типа активности [20, 21]. Из-за ограничений моделирования гауссовского шума в исследовании также рассматривалась STA, смоделированная на реальном человеке. Компоненты STA состоят из компонентов твердого тела (поступательное и вращательное) и деформационных [22]. Большая часть STA создается жестким движением, а не его деформацией. Деформации можно избежать, если использовать жесткую пластину с маркерами.Таким образом, в нашем исследовании рассматривался только жесткий компонент STA. Мы использовали общедоступные данные STA ex-vivo из [23], которые предоставляют анатомическую систему координат (ACS) таза и бедра и характеристики STA 12 маркеров в ACS бедренной кости во время движения бедра. Маркеры M04 и M07 были выбраны для моделирования STA, поскольку их положения маркеров в основном близки к кластерным размещениям на сегменте.
Фильтр нижних частот Баттерворта четвертого порядка с частотой среза 10 Гц использовался для удаления избыточного высокочастотного шума.Исследования показали, что STA зависит от площади сегмента, на котором расположен конкретный маркер, антропометрии объекта и типа активности [20, 21]. Из-за ограничений моделирования гауссовского шума в исследовании также рассматривалась STA, смоделированная на реальном человеке. Компоненты STA состоят из компонентов твердого тела (поступательное и вращательное) и деформационных [22]. Большая часть STA создается жестким движением, а не его деформацией. Деформации можно избежать, если использовать жесткую пластину с маркерами.Таким образом, в нашем исследовании рассматривался только жесткий компонент STA. Мы использовали общедоступные данные STA ex-vivo из [23], которые предоставляют анатомическую систему координат (ACS) таза и бедра и характеристики STA 12 маркеров в ACS бедренной кости во время движения бедра. Маркеры M04 и M07 были выбраны для моделирования STA, поскольку их положения маркеров в основном близки к кластерным размещениям на сегменте. Математическая модель была рассчитана на основе линейной зависимости между измеренной STA и кинематикой тазобедренного сустава с использованием метода наименьших квадратов [15, 19, 24].Одинаковый смоделированный шум применялся ко всем маркерам на одной жесткой пластине. Мы вычислили CoR с данными зашумленных маркеров и рассчитали RMSE для всех функциональных методов.
Математическая модель была рассчитана на основе линейной зависимости между измеренной STA и кинематикой тазобедренного сустава с использованием метода наименьших квадратов [15, 19, 24].Одинаковый смоделированный шум применялся ко всем маркерам на одной жесткой пластине. Мы вычислили CoR с данными зашумленных маркеров и рассчитали RMSE для всех функциональных методов.
Результаты
Результаты общей линейной модели ANOVA (рис. 2) показали, что такие факторы, как скорость движения, размер кластера и расстояние до кластера, не имели существенного влияния на оценку CoR, тогда как размещение кластера, диапазон перемещения и функциональные методы были существенными факторами.Размещение кластера было наиболее значимым фактором, повлиявшим на оценку CoR. Оценка CoR с использованием кластеров передних маркеров на проксимальном и дистальном сегментах (FF) была значительно ближе к эталону CoR, чем другие комбинации кластеров. Наилучшая оценка CoR со средним значением RMSE 4,7 мм была достигнута с использованием передних кластеров и метода ASF.
Рис. 2. Матрица эффектов ANOVA общей линейной модели, примененная к ошибке оценки CoR (RMSE).
Результаты показали, что расположение кластеров, диапазон движений, функциональные методы имеют существенное влияние на результаты.Значимые эффекты при α <0,05 обозначены *, а α <0,001 - **.
https://doi.org/10.1371/journal.pone.0210807.g002
Рис. 2 показывает, что влияние факторов на два типа методов было различным. По сравнению с методами трансформации, методы подбора сферы были более чувствительны к диапазону движения и скорости движения. Медленное и чрезмерное движение было значительно ближе к эталону CoR, чем другие модели движения при использовании методов ASF и GSF.CTT и SCoRE достигли более точного функционального CoR, когда дистальный кластер был помещен ближе к суставу. На методы ASF и GSF, напротив, меньше влияло кластерное расстояние. Более того, точность оценки CoR с помощью методов подгонки сфер была улучшена при использовании большого кластера, в то время как фактор имел противоположное влияние на методы CTT и SCoRE.
Функциональные методы не зависели от скорости движения. Поскольку в нашем исследовании для вычисления местоположения CoR использовалось пять циклов движения, количество выборок данных было различным в испытаниях медленного и быстрого движения, что не оказывает значительного влияния на точность локализации CoR.Мы проанализировали оценочную RMSE, связанную с циклом движения, как показано на рис. 3. RMSE было значительно уменьшено за счет увеличения цикла движения с 1 до 5. Алгоритмы подбора сфер были более чувствительны к количеству циклов, чем методы преобразования. Не было обнаружено значительного улучшения при использовании более пяти циклов движения.
Рис. 3. Ошибка локализации CoR (RMSE) для функциональных методов с варьированием цикла движения.
Результаты показали, что точность оценки CoR была значительно улучшена за счет увеличения цикла движения с 1 до 5.Данные относятся к быстрому и нормальному движению.
https://doi.org/10.1371/journal. pone.0210807.g003
pone.0210807.g003
Расположение проксимальной координаты оказало важное влияние на оценку CoR, как показано на рис. 4. Результаты RMSE варьировались от 4,35 до 36,38 мм в алгоритмов трансформации и изменено с 2,27 до 81,42 мм с использованием методов подгонки сфер. Обнаружилась значимая сильная положительная корреляция между смещением начала проксимальной координаты к центру сустава вдоль медиально-латеральной оси и точностью оценки CoR (Таблица 2).
Рис. 4. Распределение ошибок начала проксимальной координаты, изменяющееся во фронтальной и поперечной плоскостях при применении четырех различных функциональных методов.
Начало проксимальной системы координат варьировалось с шагом 10 мм и составляло от 0 до 150 мм вдоль медиально-боковой оси, от -50 до 100 мм вдоль задне-передней оси и от 0 до 2000 вдоль нижней -верхняя ось.
https://doi.org/10.1371/journal.pone.0210807.g004
Влияние изменения дистальной координаты на ошибки CoR при использовании методов CTT и SCoRE показано на рис. 5. Медиально-латеральное расстояние от исходной точки до центра сустава в значительной степени связано с ошибками CoR и коэффициентом корреляции. показал наличие умеренно положительной взаимосвязи (таблица 2). Вклад центроида выбранных маркеров в оценку CoR был проанализирован для методов ASF и GSF, как показано на рис. 5. Наблюдалась значительная положительная взаимосвязь между медиально-латеральным и задне-передним смещением и RMSE, в то время как значительно слабая связь была обнаружена для верхнего-нижнего расстояния до суставного центра.
5. Медиально-латеральное расстояние от исходной точки до центра сустава в значительной степени связано с ошибками CoR и коэффициентом корреляции. показал наличие умеренно положительной взаимосвязи (таблица 2). Вклад центроида выбранных маркеров в оценку CoR был проанализирован для методов ASF и GSF, как показано на рис. 5. Наблюдалась значительная положительная взаимосвязь между медиально-латеральным и задне-передним смещением и RMSE, в то время как значительно слабая связь была обнаружена для верхнего-нижнего расстояния до суставного центра.
Рис. 5. Вклад расположения дистального маркера в оценку CoR.
Распределение средней среднеквадратичной ошибки (RMSE) исходной точки дистальной координаты, варьирующееся во фронтальной и поперечной плоскостях, было вычислено для CTT и SCoRE, в то время как корреляция между центроидом маркеров и RMSE была проанализирована для методов GSF и ASF.
https://doi.org/10.1371/journal.pone.0210807.g005
Введение случайного гауссовского шума привело к значительному увеличению ошибок CoR. Алгоритмы подбора сфер, особенно метод GSF, были более чувствительны к приложенному шуму по сравнению с CTT и SCoRE (рис. 6). Когда применялся шум 20 мм, средние ошибки, связанные с GSF и CTT, увеличились на 51,67 ± 32,54 мм и 23,01 ± 9,15 мм соответственно. Была значительная разница ( p <0,001) между способностью алгоритмов преобразования и подгонки сфер отклонять шум с квазиплоскостным движением.
Алгоритмы подбора сфер, особенно метод GSF, были более чувствительны к приложенному шуму по сравнению с CTT и SCoRE (рис. 6). Когда применялся шум 20 мм, средние ошибки, связанные с GSF и CTT, увеличились на 51,67 ± 32,54 мм и 23,01 ± 9,15 мм соответственно. Была значительная разница ( p <0,001) между способностью алгоритмов преобразования и подгонки сфер отклонять шум с квазиплоскостным движением.
Рис. 6. Ошибки оценки CoR (RMSE) при изменении амплитуд случайного гауссовского шума.
Случайный гауссов шум был применен к проксимальному (A) и дистальному (B) маркерам соответственно. Средние изменения, связанные с алгоритмами CTT и SCoRE, меньше, чем средние изменения, полученные с помощью методов подгонки сфер. Каждая полоса ошибок представляет собой одно стандартное отклонение. Данные относятся к модели «быстрого и нормального» движения.
https://doi.org/10.1371/journal.pone.0210807.g006
STA, смоделированные на основе данных ex-vivo (рис. 7A), были добавлены к маркерам на латеральном и переднем дистальном кластерах.Более крупная STA была сформирована в маркере на боковой стороне бедра (M04) по сравнению с передним маркером (M07). При применении STA алгоритмы преобразования достигли более точного местоположения CoR (<14 мм), чем методы ASF и GSF. GSF оказался наиболее чувствительным к введенному STA со средним значением RMSE 138,56 ± 17,26 мм.
7A), были добавлены к маркерам на латеральном и переднем дистальном кластерах.Более крупная STA была сформирована в маркере на боковой стороне бедра (M04) по сравнению с передним маркером (M07). При применении STA алгоритмы преобразования достигли более точного местоположения CoR (<14 мм), чем методы ASF и GSF. GSF оказался наиболее чувствительным к введенному STA со средним значением RMSE 138,56 ± 17,26 мм.
Рис. 7. Результаты оценки CoR при введении шума, смоделированного на основе реалистичных артефактов мягких тканей (STA).
(A) Реалистичная STA была смоделирована на основе линейной зависимости угла тазобедренного сустава в бедренной анатомической системе координат (ACS) механической связи для «быстрого и нормального» движения.Использованы данные ex vivo из [23]. Набор данных обеспечивает характеристики ACS таза и бедра и STA 12 маркеров в ACS бедренной кости во время движения бедра. Маркеры M04 и M07 были выбраны для моделирования STA, поскольку их положения маркеров в основном близки к кластерным размещениям на сегменте. Использовалась математическая модель, основанная на линейной зависимости между измеренной кинематикой STA и тазобедренного сустава, а модельные коэффициенты маркеров M04 и M07 были рассчитаны с использованием методов наименьших квадратов соответственно.(B) Ошибки локализации CoR со всеми четырьмя алгоритмами, когда смоделированная STA применялась к дистальным маркерам.
Использовалась математическая модель, основанная на линейной зависимости между измеренной кинематикой STA и тазобедренного сустава, а модельные коэффициенты маркеров M04 и M07 были рассчитаны с использованием методов наименьших квадратов соответственно.(B) Ошибки локализации CoR со всеми четырьмя алгоритмами, когда смоделированная STA применялась к дистальным маркерам.
https://doi.org/10.1371/journal.pone.0210807.g007
Обсуждение и заключение
Точность оценки CoR чувствительна к реализации функциональных методов [3, 7, 12, 25]. В этом исследовании мы использовали механическую связь, чтобы исследовать производительность четырех функциональных методов, которые определяют CoR во время квазиплоского движения.Использование механической связи обеспечивает хороший инструмент для понимания различий в реализации функциональных методов и их влияния на точность оценки CoR [5, 10]. Это поможет установить верхний предел точности функциональных методов с четко определенными параметрами суставов. Результаты моделирования предоставляют рекомендации по использованию функциональных методов на людях с ограниченным движением в плоскости. Наши результаты показали, что точность локализации CoR была чувствительна к ряду экспериментальных и аналитических факторов, особенно к расположению локальных систем координат.
Результаты моделирования предоставляют рекомендации по использованию функциональных методов на людях с ограниченным движением в плоскости. Наши результаты показали, что точность локализации CoR была чувствительна к ряду экспериментальных и аналитических факторов, особенно к расположению локальных систем координат.
Было выбрано четыре алгоритма, которые подверглись сравнительному анализу. Методы CTT и SCoRE показали сходные характеристики с точки зрения точности со средней ошибкой 5,33 ± 2,38 мм. Методы подгонки сфер дали ошибки 2,58 ± 2,49 и 3,22 ± 3,37 мм соответственно для GSF и ASF. Результаты сопоставимы с предыдущими исследованиями [10, 16]. Ошибка CoR с методами преобразования больше, чем результаты, представленные в [16], в то время как методы подгонки сфер дали лучшую оценку по сравнению с [10].Повышенная ошибка в CTT и SCoRE может быть вызвана распространением стереофотограмметрической ошибки, когда маркеры расположены близко друг к другу на жесткой пластине [20]. Piazza et al. [10] сообщили, что алгоритм подгонки сфер был чувствителен к диапазону движения, в то время как наши результаты также показали, что увеличение диапазона движения значительно снижает ошибку в методах подбора сфер (рис. 2). При использовании алгоритма преобразования [16] не было обнаружено существенной разницы в средних ошибках CoR между квази-одиночными плоскими движениями с различными амплитудами [16], что также согласуется с нашими результатами.
[10] сообщили, что алгоритм подгонки сфер был чувствителен к диапазону движения, в то время как наши результаты также показали, что увеличение диапазона движения значительно снижает ошибку в методах подбора сфер (рис. 2). При использовании алгоритма преобразования [16] не было обнаружено существенной разницы в средних ошибках CoR между квази-одиночными плоскими движениями с различными амплитудами [16], что также согласуется с нашими результатами.
Функциональные методы предполагают фиксированное CoR во время движения и математически оценивают положение CoR, минимизируя целевую функцию всего набора данных маркеров [3]. В соответствии с Camomilla et al. [5], мы обнаружили, что расположение дистального кластера маркеров имеет решающее значение для выполнения функциональных методов во время квазиплоского движения. Рис. 5 показывает, что на ошибку CoR значительно влияют параметры кластера дистальных маркеров. Центроид группы маркеров должен быть расположен как можно ближе к центру сустава. Для алгоритмов подгонки сфер уменьшение размера кластера увеличивало ошибки CoR, поскольку фактор усиливал влияние стереофотограмметрической ошибки на маркеры [20]. Влияние проксимального начала координат впервые было проанализировано в нашем исследовании. Ошибка CoR увеличивалась при увеличении расстояния координаты от центра сустава по медиально-боковой оси (рис. 4). Проксимальный кластер следует размещать как можно ближе к центру сустава по медиально-латеральной оси, но как можно дальше от сустава по нижне-верхней оси.В любом случае наши результаты показали, что кластеры маркеров должны быть расположены близко к центру сустава с медиально-латерального направления, чтобы компенсировать недостаток информации о движении в этой плоскости.
Для алгоритмов подгонки сфер уменьшение размера кластера увеличивало ошибки CoR, поскольку фактор усиливал влияние стереофотограмметрической ошибки на маркеры [20]. Влияние проксимального начала координат впервые было проанализировано в нашем исследовании. Ошибка CoR увеличивалась при увеличении расстояния координаты от центра сустава по медиально-боковой оси (рис. 4). Проксимальный кластер следует размещать как можно ближе к центру сустава по медиально-латеральной оси, но как можно дальше от сустава по нижне-верхней оси.В любом случае наши результаты показали, что кластеры маркеров должны быть расположены близко к центру сустава с медиально-латерального направления, чтобы компенсировать недостаток информации о движении в этой плоскости.
Количество выборок данных для оптимальной функциональной калибровки должно быть больше 500 при частоте дискретизации 60 Гц (время выполнения ≈ 10 с) [5]. Увеличение количества выборок данных с 240 до 500 привело к снижению ошибок оценки на 40%. Рис. 3 показал, что необходимо выполнить не менее 5 циклов движения (≈ 10 секунд), что согласуется с результатами предыдущего исследования.Методы подбора сферы были более чувствительны к количеству циклов движения. CTT и SCoRE предпочтительнее, когда испытуемому трудно повторить движение.
Рис. 3 показал, что необходимо выполнить не менее 5 циклов движения (≈ 10 секунд), что согласуется с результатами предыдущего исследования.Методы подбора сферы были более чувствительны к количеству циклов движения. CTT и SCoRE предпочтительнее, когда испытуемому трудно повторить движение.
Мы оценили производительность алгоритмов со случайным гауссовым шумом и смоделировали STA, как показано на рисунках 6 и 7. Результаты показали, что функциональные методы имеют худшие характеристики подавления шума, когда движение в основном ограничивалось в одной плоскости. При наличии обоих типов шума алгоритмы подбора сфер более чувствительны к приложенному шуму по сравнению с CTT и SCoRE.Этот результат согласуется с результатами [16]. ASF приводит к меньшему RMSE, чем GSF, поскольку процедура компенсации смещения может уменьшить влияние шума на производительность алгоритма [18].
В недавних исследованиях in vivo на людях изучалась точность локализации HJC с использованием функциональных методов по сравнению с методами медицинской визуализации и сравнивалась ошибка оценки HJC прогностических методов и функциональных методов [9, 11, 12, 14]. Все результаты исследований подтверждают, что метод Харрингтона является лучшим методом прогнозирования [9, 11, 13, 14].Однако результаты о функциональных методах в разных исследованиях различаются. Sangeux et al. [11] сообщили, что методы подгонки сфер лучше всего работают в функциональных техниках с точностью примерно 15 мм. Аналогичные результаты были продемонстрированы также в [13, 14]. С другой стороны, Fiorentino et al. [9] сообщили о средней точности 11,1 и 10,8 мм для метода преобразования Шварца и метода SCoRE соответственно. Несмотря на то, что в двух исследованиях использовалась медицинская техника изображения [9, 11], основное различие между условиями эксперимента заключалось в типе кластера маркеров: кожа [11] и жесткий кластер маркеров [9].STA играет важную роль в возникновении неточностей в оценке HJC. Результаты моделирования, проведенного Ehrig et al. [3] показали, что функциональные методы обеспечивают лучшую оценку CoR, когда гауссовский шум (стандартное отклонение 0,1 см) применялся ко всем маркерам на сегменте, чем когда одинаково распределенный гауссовский шум (стандартное отклонение 0,1 см) применялся к каждому маркеру.
Все результаты исследований подтверждают, что метод Харрингтона является лучшим методом прогнозирования [9, 11, 13, 14].Однако результаты о функциональных методах в разных исследованиях различаются. Sangeux et al. [11] сообщили, что методы подгонки сфер лучше всего работают в функциональных техниках с точностью примерно 15 мм. Аналогичные результаты были продемонстрированы также в [13, 14]. С другой стороны, Fiorentino et al. [9] сообщили о средней точности 11,1 и 10,8 мм для метода преобразования Шварца и метода SCoRE соответственно. Несмотря на то, что в двух исследованиях использовалась медицинская техника изображения [9, 11], основное различие между условиями эксперимента заключалось в типе кластера маркеров: кожа [11] и жесткий кластер маркеров [9].STA играет важную роль в возникновении неточностей в оценке HJC. Результаты моделирования, проведенного Ehrig et al. [3] показали, что функциональные методы обеспечивают лучшую оценку CoR, когда гауссовский шум (стандартное отклонение 0,1 см) применялся ко всем маркерам на сегменте, чем когда одинаково распределенный гауссовский шум (стандартное отклонение 0,1 см) применялся к каждому маркеру. Результаты показывают, что использование жесткого маркерного кластера может повысить точность функциональных методов за счет устранения деформации маркерного кластера, особенно для CTT и SCoRE.Необходимы дальнейшие исследования для изучения влияния отдельных маркеров и кластеров маркеров на оценку HJC у людей.
Результаты показывают, что использование жесткого маркерного кластера может повысить точность функциональных методов за счет устранения деформации маркерного кластера, особенно для CTT и SCoRE.Необходимы дальнейшие исследования для изучения влияния отдельных маркеров и кластеров маркеров на оценку HJC у людей.
Функциональные методы показали лучшее общее согласие с эталонными данными объединенного центра, чем методы прогнозирования для здоровых взрослых [9, 11, 12]. Исследования, в которых изучалась точность как методов прогнозирующей регрессии, так и функциональных методов у детей с церебральным параличом [13, 26], показали, что уравнение Харрингтона лучше всего согласуется с подходами к медицинским изображениям при прогнозировании HJC.Разница в результатах, полученных между взрослыми [11] и детьми [13], может быть связана с более коротким сегментом бедра у детей. Более близкое расстояние до маркера может усилить влияние стереофотограмметрических ошибок в оценке HJC. Снижение мышечного тонуса также может быть существенным фактором ошибок HJC [14]. Для клинического применения наиболее подходят методы Харрингтона и функциональные методы [9]. Метод Харрингтона предпочтительнее применять для пациентов с нарушением моторного контроля, таких как пациенты с церебральным параличом или остеоартритом бедра [14].Текущая реализация функционального метода больше подходит для здоровых взрослых.
Для клинического применения наиболее подходят методы Харрингтона и функциональные методы [9]. Метод Харрингтона предпочтительнее применять для пациентов с нарушением моторного контроля, таких как пациенты с церебральным параличом или остеоартритом бедра [14].Текущая реализация функционального метода больше подходит для здоровых взрослых.
Текущая реализация функциональных методов имеет свои ограничения в исследованиях на людях, когда движения бедра выполнялись в сокращенных плоскостях [5, 7, 14]. Когда субъект выполнял движение бедра, включающее движение в сагиттальной и фронтальной плоскости, наибольшая ошибка в оценке CoR наблюдалась в медиально-латеральном направлении [7], где движение маркера было недоступно. Наши результаты показали, что размещение проксимальной координаты имеет решающее значение для выполнения функциональных алгоритмов во время ограниченных движений плоскости, а начало проксимальной координаты компенсирует недостаток информации в плоскости.Это может объяснить повышенные ошибки CoR из-за ограниченного движения, когда начало координат таза определялось как средняя точка передних / задних маркеров таза [5, 7, 27]. Оптимальное проксимальное расположение координат может улучшить точность оценки CoR во время ограниченных движений плоскости. Функциональные методы могут получить лучшую оценку HJC у субъектов с дисфункцией движения, когда применяется оптимизированная реализация.
Оптимальное проксимальное расположение координат может улучшить точность оценки CoR во время ограниченных движений плоскости. Функциональные методы могут получить лучшую оценку HJC у субъектов с дисфункцией движения, когда применяется оптимизированная реализация.
В целом, согласно результатам нашего исследования, можно определить CoR, когда происходит квазиплоское движение.Факторы, которые могут существенно повлиять на точность определения местоположения CoR, сведены в Таблицу 3. Наши результаты соответствуют рекомендациям, предложенным Camomilla et al. [5], что центроид маркеров расположен как можно ближе к бедру, а маркеры расположены на возможном расстоянии друг от друга. Более того, мы хотели бы предложить дополнительные факторы, которые необходимо учитывать для практической реализации. Во-первых, проксимальный маркерный кластер следует размещать как можно ближе от центра сустава в медиально-латеральном направлении и как можно дальше по нижне-верхней оси.Во-вторых, алгоритмы CTT и SCoRE превосходят методы подгонки сфер при применении шума. Наконец, диапазон движения не имеет значения при использовании методов трансформации. После создания оптимального протокола, включающего вышеупомянутые факторы, необходима дополнительная работа для оценки протокола в клинической среде.
Наконец, диапазон движения не имеет значения при использовании методов трансформации. После создания оптимального протокола, включающего вышеупомянутые факторы, необходима дополнительная работа для оценки протокола в клинической среде.
Ссылки
- 1.
Стагни Р., Лирдини А., Каппоццо А., Бенедетти М. Г., Каппелло А. Влияние смещения центра тазобедренного сустава на результаты анализа походки.Журнал биомеханики. 2000. 33 (11): 1479–1487. pmid: 10940407
- 2.
Каппоццо А. Методика анализа походки. Наука человеческого движения. 1984. 3 (1–2): 27–50.
- 3.
Эриг Р. М., Тейлор В. Р., Дуда Г. Н., Хеллер М. О.. Обзор формальных методов определения центра вращения шаровых опор. Журнал биомеханики. 2006. 39 (15): 2798–2809. pmid: 16293257
- 4.
Бегон М., Монне Т., Лакутюр П. Эффекты движения для оценки центра тазобедренного сустава.Походка и поза. 2007. 25 (3): 353–359.
- 5.
Camomilla V, Cereatti A, Vannozzi G, Cappozzo A.
 Оптимизированный протокол для определения центра тазобедренного сустава с использованием функционального метода. Журнал биомеханики. 2006. 39 (6): 1096–1106. pmid: 16549099
Оптимизированный протокол для определения центра тазобедренного сустава с использованием функционального метода. Журнал биомеханики. 2006. 39 (6): 1096–1106. pmid: 16549099 - 6.
Лопомо Н., Сан Л., Заффаньини С., Джордано Дж., Safran MR. Оценка формальных методов оценки центра тазобедренного сустава: анализ in vitro. Клиническая биомеханика. 2010. 25 (3): 206–212. pmid: 20006913
- 7.Piazza SJ, Erdemir A, Okita N, Cavanagh PR. Оценка функционального способа расположения центра тазобедренного сустава с учетом уменьшения объема движений бедра. Журнал биомеханики. 2004. 37 (3): 349–356. pmid: 14757454
- 8.
Кратценштейн С., Корнаропулос Э.И., Эриг Р.М., Хеллер М.О., Пёпплау Б.М., Тейлор В.Р. Эффективное размещение маркера для функциональной идентификации центра вращения на бедре. Походка и поза. 2012. 36 (3): 482–486.
- 9.
Фиорентино Н.М., Кучке М.Дж., Аткинс П.Р., Форман КБ, Капрон А.Л., Андерсон А.Е.Точность функциональных и прогностических методов для расчета центра тазобедренного сустава у молодых непатологических бессимптомных взрослых с использованием двойной рентгеноскопии в качестве эталона.
Анналы биомедицинской инженерии. 2016; 44 (7): 2168–2180. pmid: 26645080 - 10.
Piazza SJ, Okita N, Cavanagh PR. Точность функционального метода локализации центра тазобедренного сустава: эффекты ограниченности движений и разнообразия исполнения. Журнал биомеханики. 2001. 34 (7): 967–973. pmid: 11410180
- 11.Sangeux M, Peters A, Baker R. Локализация центра тазобедренного сустава: оценка нормальных субъектов в контексте анализа походки. Походка и поза. 2011. 34 (3): 324–328. https://doi.org/10.1016/j.gaitpost.2011.05.019.
- 12.
Uk M, wiatek-Najwer E, Pezowicz C. Локализация центра тазобедренного сустава: оценка формальных методов и влияние на кинематику сустава. В: Информационные технологии в биомедицине, Том 4. Springer; 2014. с. 57–67.
- 13.
Питерс А., Бейкер Р., Моррис М.Э., Санжо М.Сравнение методов локализации центра тазобедренного сустава с 3-DUS для клинического анализа походки у детей с церебральным параличом.
Походка и поза. 2012. 36 (2): 282–286. https://doi.org/10.1016/j.gaitpost.2012.03.011. - 14.
Sangeux M, Pillet H, Skalli W. Какой метод локализации центра тазобедренного сустава следует использовать при анализе походки? Походка и поза. 2014; 40 (1): 20–25.
- 15.
Карман А.Б., Милберн П.Д. Определение параметров преобразования твердого тела по плохо обусловленным координатам пространственных маркеров.Журнал биомеханики. 2006. 39 (10): 1778–1786. https://doi.org/10.1016/j.jbiomech.2005.05.028. pmid: 16098982
- 16.
Систон Р.А., Дельп С.Л. Оценка нового алгоритма определения центра тазобедренного сустава. Журнал биомеханики. 2006. 39 (1): 125–130. pmid: 16271596
- 17.
Gamage SSHU, Lasenby J. Новые решения методом наименьших квадратов для оценки среднего центра вращения и оси вращения. Журнал биомеханики. 2002. 35 (1): 87–93. pmid: 11747887
- 18.Халворсен К. Смещение скомпенсированной оценки центра вращения методом наименьших квадратов. Журнал биомеханики. 2003. 36 (7): 999–1008. pmid: 12757809
- 19.
Бончи Т., Камомилла В., Дюма Р., Чез Л., Каппоццо А. Модель артефакта мягких тканей, управляемая кинематикой проксимального и дистального суставов. Журнал биомеханики. 2014. 47 (10): 2354–2361. pmid: 24818796
- 20.
Cappozzo A, Cappello A, Croce UD, Pensalfini F. Критерии построения кластеров поверхностных маркеров для трехмерной реконструкции движения кости.IEEE Transactions по биомедицинской инженерии. 1997. 44 (12): 1165–1174. pmid: 9401217
- 21.
Петерс А., Гална Б., Санжё М., Моррис М., Бейкер Р. Количественная оценка артефактов мягких тканей в анализе движений человека нижних конечностей: систематический обзор. Походка и поза. 2010. 31 (1): 1–8. https://doi.org/10.1016/j.gaitpost.2009.09.004.
- 22.
Андерсен М.С., Дамсгаард М., Расмуссен Дж., Рэмси Д.К., Бенуа Д.Л. Линейная модель артефакта мягких тканей для анализа движений человека: подтверждение концепции с использованием данных in vivo.
Походка и поза. 2012. 35 (4): 606–611. https://doi.org/10.1016/j.gaitpost.2011.11.032. - 23.
Сереатти А., Бончи Т., Акбаршахи М., Аминиан К., Барре А., Бегон М. и др. Предложение по стандартизации описания артефакта мягких тканей для обмена данными при измерениях движения человека. Журнал биомеханики. 2018; 62: 5–13.
- 24.
Camomilla V, Bonci T, Dumas R, Cheze L, Cappozzo A. Модель жесткого компонента артефакта мягких тканей. Журнал биомеханики. 2015. 48 (10): 1752–1759.pmid: 26091618
- 25.
Эриг Р. М., Тейлор В. Р., Дуда Г. Н., Хеллер М. О.. Обзор формальных методов определения функциональных осей суставов. Журнал биомеханики. 2007. 40 (10): 2150–2157. pmid: 17169365
- 26.
Асси А., Соре С., Массаад А., Бакуни З., Пиллет Н., Скалли В. и др. Валидация методов локализации центра тазобедренного сустава при анализе походки с использованием 3D EOS-визуализации у типично развивающихся детей и детей с церебральным параличом.
Походка и поза. 2016; 48: 30–35. https: // doi.org / 10.1016 / j.gaitpost.2016.04.028. - 27.
Cereatti A, Donati M, Camomilla V, Margheritini F, Cappozzo A. Расположение центра тазобедренного сустава: исследование ex vivo. Журнал биомеханики; 42 (7): 818–823. pmid: 19268947
 Оптимизированный протокол для определения центра тазобедренного сустава с использованием функционального метода. Журнал биомеханики. 2006. 39 (6): 1096–1106. pmid: 16549099
Оптимизированный протокол для определения центра тазобедренного сустава с использованием функционального метода. Журнал биомеханики. 2006. 39 (6): 1096–1106. pmid: 16549099 Анналы биомедицинской инженерии. 2016; 44 (7): 2168–2180. pmid: 26645080
Анналы биомедицинской инженерии. 2016; 44 (7): 2168–2180. pmid: 26645080 Походка и поза. 2012. 36 (2): 282–286. https://doi.org/10.1016/j.gaitpost.2012.03.011.
Походка и поза. 2012. 36 (2): 282–286. https://doi.org/10.1016/j.gaitpost.2012.03.011. Журнал биомеханики. 2003. 36 (7): 999–1008. pmid: 12757809
Журнал биомеханики. 2003. 36 (7): 999–1008. pmid: 12757809 Походка и поза. 2012. 35 (4): 606–611. https://doi.org/10.1016/j.gaitpost.2011.11.032.
Походка и поза. 2012. 35 (4): 606–611. https://doi.org/10.1016/j.gaitpost.2011.11.032. Походка и поза. 2016; 48: 30–35. https: // doi.org / 10.1016 / j.gaitpost.2016.04.028.
Походка и поза. 2016; 48: 30–35. https: // doi.org / 10.1016 / j.gaitpost.2016.04.028.планарных графиков — ошибки по модулю
Ранее в этом году я принимал участие в создании «Гигантского 4D Buckyball» в рамках Недели инновационного обучения Эдинбургского университета. Скульптура на самом деле была чем-то более сложным — усеченным Кантитом 600 ячейками — но бакиболы (в различных представлениях) были фундаментальным строительным блоком.Итак, что именно они?
Описание Джулии дает хороший обзор геометрического маршрута к бакиболу (и далее к полной скульптуре). Но одна из замечательных особенностей математики заключается в том, что к одному и тому же месту часто можно пройти несколько маршрутов, причем кажущиеся несопоставимыми субдисциплины фактически представляют собой одну и ту же замаскированную идею. Итак, мое первое знакомство с бакиболом пришло не из размышлений о физической геометрии, а в более абстрактном мире теории графов. В этом посте я опишу первый шаг на этом альтернативном пути, плоских графиков .
Итак, мое первое знакомство с бакиболом пришло не из размышлений о физической геометрии, а в более абстрактном мире теории графов. В этом посте я опишу первый шаг на этом альтернативном пути, плоских графиков .
График , по сути, представляет собой описание соединений; набор вершин, соединенных ребрами. Их, конечно, можно использовать для понимания буквальных сетей: телефонные системы, электросети, маршруты авиакомпаний; менее ощутимые связи, такие как дружба в вашей «социальной сети»; вплоть до чисто абстрактных математических структур. Мое докторское исследование представило проблему теории чисел в контексте некоторых специальных типов графиков, с одним из основных преимуществ, которые заключались в том, что их рисование давало визуальный способ понять и рассуждать об их структуре.
Но существует множество способов нарисовать определенный график, и, как правило, нельзя сказать, что один из них «правильный». Поэтому думать о графике с точки зрения его рисунка может быть опасно — вы должны быть уверены, что аргументы, которые вы делаете, применимы ко всем представлениям абстрактного графа, а не только к выбранному вами. Примечательно, что такие широкие заявления можно делать. Это иллюстрируется концепцией плоского графа . Это тот, который можно нарисовать в 2D-плоскости (например,грамм. на листе бумаги) без пересечения ни одной из линий, соединяющих вершины. Важно понимать, что то, что на конкретном рисунке есть пересечения, не означает, что без них нет лучшего. Единственный успешный пример, конечно, помогает доказать планарность графа:
Примечательно, что такие широкие заявления можно делать. Это иллюстрируется концепцией плоского графа . Это тот, который можно нарисовать в 2D-плоскости (например,грамм. на листе бумаги) без пересечения ни одной из линий, соединяющих вершины. Важно понимать, что то, что на конкретном рисунке есть пересечения, не означает, что без них нет лучшего. Единственный успешный пример, конечно, помогает доказать планарность графа:
В приведенном выше примере показаны две попытки нарисовать граф, известный как K 4 — у него четыре вершины, каждая из которых соединена с тремя другими ребром.Первый рисунок может заставить вас подумать, что он не плоский, но второй доказывает, что это так.
Из моих путешествий: Граффити в Массачусетском технологическом институте, «доказательство» того, что граф K 5 (пять вершин, каждая из которых соединяется с четырьмя другими) не является плоским. Хотя таким образом можно привести тонкий аргумент, гораздо легче определить правила для всех плоских графов, чем убедиться, что вы не упустили ни одного случая, рассуждая геометрически.
Если граф плоский, то любое его рисование без пересечений называется вложением.Любой такой рисунок разделит плоскость на области, разделенные краями — мы называем их гранями, и включает бесконечную грань , которая является областью «вне» графа. Для каждой из этих граней мы определяем ее градусов и как количество ребер, по которым мы будем двигаться, если обойдем всю ее границу.
Граф с 4 гранями — четвертая, D, является бесконечной гранью.
Обычно степень очевидна, но требуется немного осторожности.В приведенном выше примере грань A имеет степень 3, а грань B — степень 4. Но грань C не является еще одним треугольником, подобным A — мы должны пройти к вершине посередине и обратно, поэтому она имеет степень 5. Наконец , бесконечная грань D имеет степень 6. Однако, если мы выберем другое вложение, мы получим другой список степеней:
Еще одно вложение того же графа.
В качестве математической абстракции это тот же граф, что и нарисованный ранее — все связи между вершинами одинаковы, мы только что разместили одну из них в другом месте на плоскости. Поскольку здесь не было никаких пересекающихся ребер, это прекрасное вложение; но теперь грань C имеет степень 3, а грань D — степень 8. Это означает, что точный список степеней может зависеть от вложения — мы говорим, что это не инвариант графа.
Поскольку здесь не было никаких пересекающихся ребер, это прекрасное вложение; но теперь грань C имеет степень 3, а грань D — степень 8. Это означает, что точный список степеней может зависеть от вложения — мы говорим, что это не инвариант графа.
Идентификация инвариантов — это одновременно и вызов, и возможность: с одной стороны, мы должны быть уверены, что что-то верно для любого возможного построения графика, чтобы получить этот статус; но с другой стороны, мы сможем контролировать, насколько странным может быть вложение, если мы будем знать, что оно вынуждено уважать какое-то инвариантное свойство.
Особенно полезным инструментом для этого является формула Эйлера :
Пусть V — количество вершин в нашем плоском графе G, а E — количество ребер; Предположим также, что граф связан с , то есть мы можем пройти от любой вершины к любой другой по некоторому пути, составленному из ребер. Если существует вложение G с F гранями, то
V — E + F = 2.
Поскольку количество вершин и ребер никогда не меняется (равно как и значение 2), это сразу говорит нам, что количество граней является инвариантом: оно будет 2 + E-V.
Хотя конкретный список степеней граней может варьироваться, оказывается, что их сумма неизменна; это известно как лемма о подтверждении установления связи для плоских графов :
Сумма всех граней вложения равна удвоенному количеству ребер E в графе.
Эти два простых результата позволяют нам многое сказать о возможных планарных графах. Например, вы можете объединить их, чтобы показать, что если граф плоский, то E≤ 3V-6 — по сути, если имеется слишком много ребер относительно количества вершин, вы не сможете нарисовать их все без переход (что имеет интуитивный смысл).Это значительно облегчает жизнь нашему граффити-художнику, приведенному выше: в K 5 у нас V = 5, поэтому 3V-6 = 9, но есть 10 краев, которые нам нужно нарисовать, поэтому это будет невозможно сделать в самолет без введения перекрестка.